
ID : 5361
照相机校准实施步骤
在传送带上设置作为3点基准的工件/标记,根据照相机的计测结果与使用机器人的位置示教结果的关系,计测照相机与机器人的正确的位置关系。按照如下步骤实施照相机校准。
对各传送带执行校准。
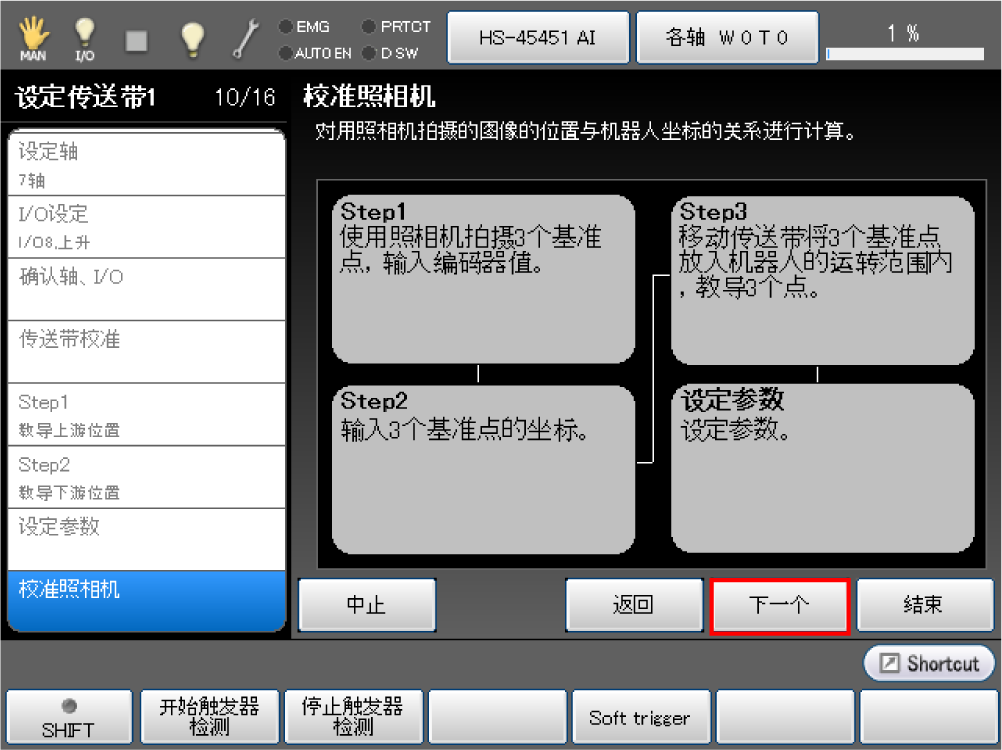
1 校准步骤的确认
显示照相机校准步骤的详细内容后,确认内容并按[下一步]。
2 取得拍摄位置的编码器值。
获取教导点3点的拍摄图像和拍摄位置的编码器值。
在传送带上设置基准点,使用照相机拍摄3点。
另外,按压[获取检测编码器值]按钮,获取拍摄位置的编码器值。
通过触发器信号获取已锁存的值。

按压[请阅读(!)教导时的注意事项]后,显示设置基准点时的注意事项。
按压[OK]-[下一页]。
3 输入基准点的视觉坐标。
输入拍摄的基准点的视觉坐标。
选择各基准物视觉坐标的数值栏后显示数字键,然后输入值并按压[OK]进行确定。
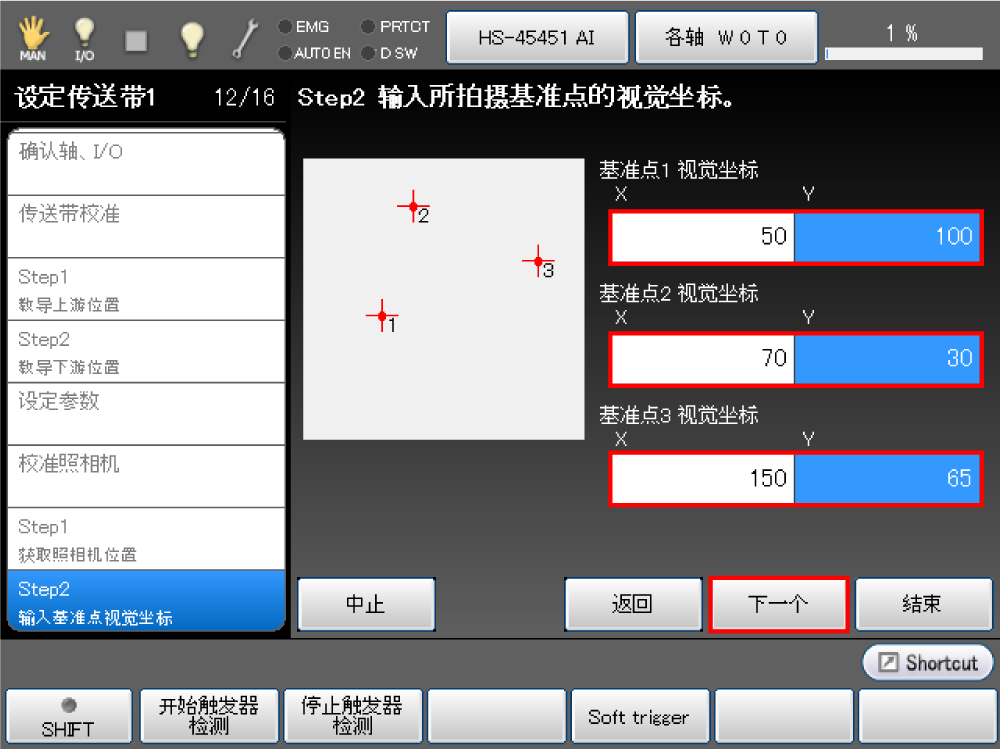
所有视觉坐标的输入完成后,按[下一步]。
4 获取基准点的机器人坐标
教导基准点1。
起动传送带,将基准点移至可教导范围内。
将机器人移至可夹持基准点的位置,通过刀尖(TCP点)按压[获取位置],并执行教导。
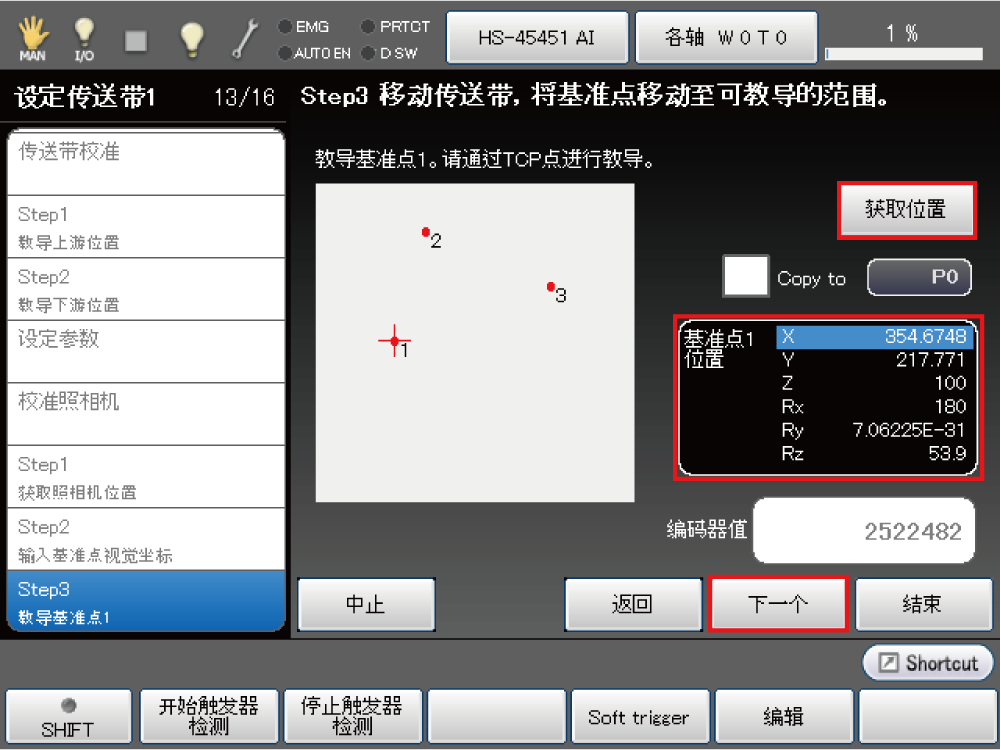
确认获取的位置,如果正确,则按[下一步]。
按照与基准点1相同的步骤获取基准点2、3的位置。
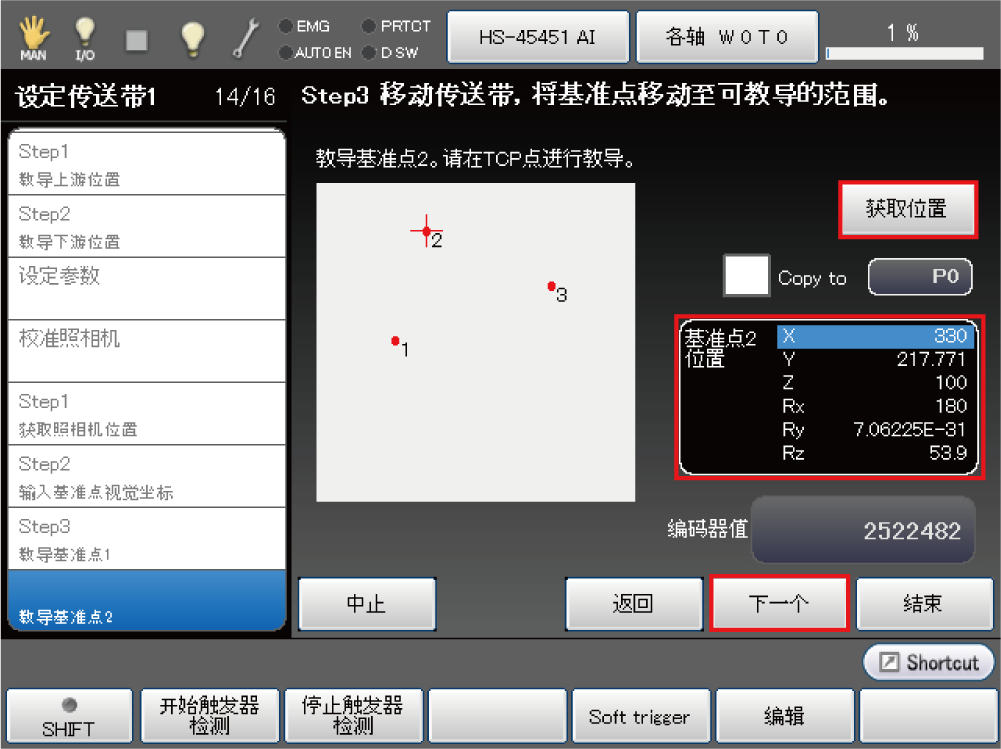
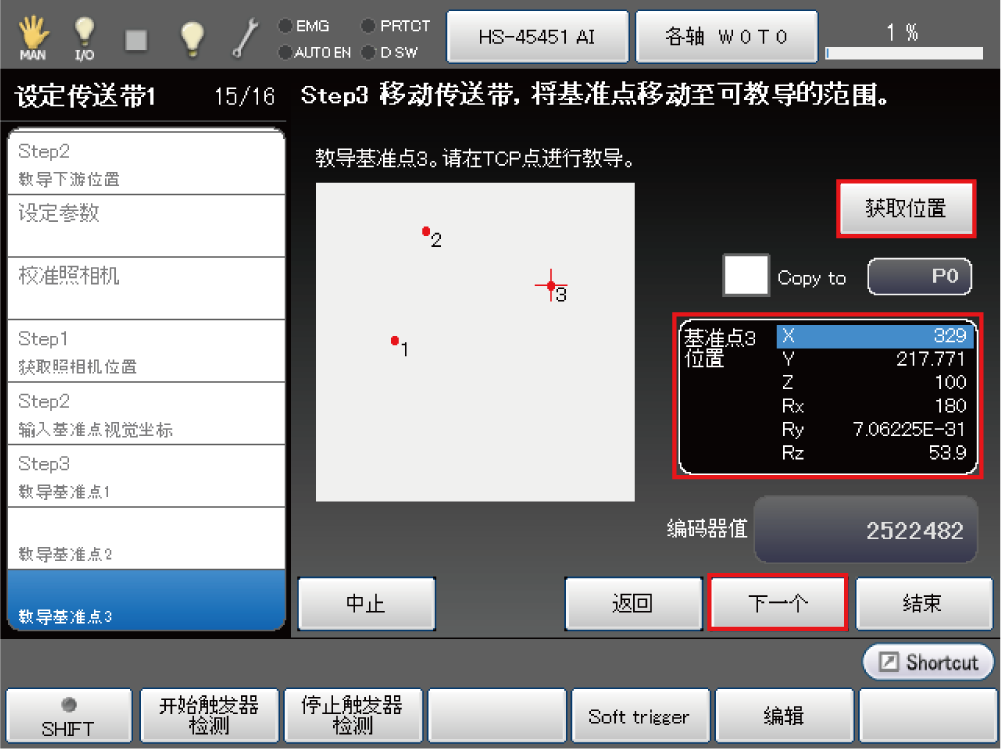
按压编辑按钮后,可变更位置的坐标。
使用获取传送带上流和下流位置的坐标和此时获取的编码器值,计算传送带的进给量和方向。因此,在考虑影响传送带的进给量和方向的因素后,再编辑坐标值。
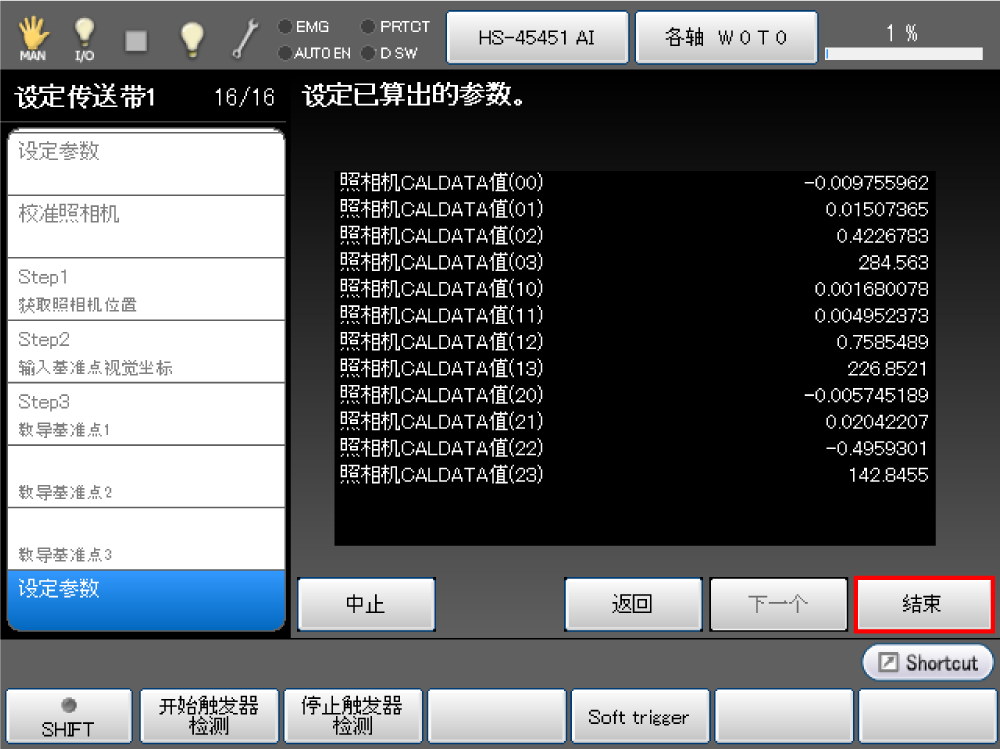
5 校准结果的确认
显示计算出的参数值后,确认内容并按压[完成]。
6 校准结果的反映
将显示系统讯息,如果正确,则按压[OK]。
在控制器中设定计算的数据。
如果按压[Cancel],则不执行设定。

保存设定,返回“跟踪”画面。
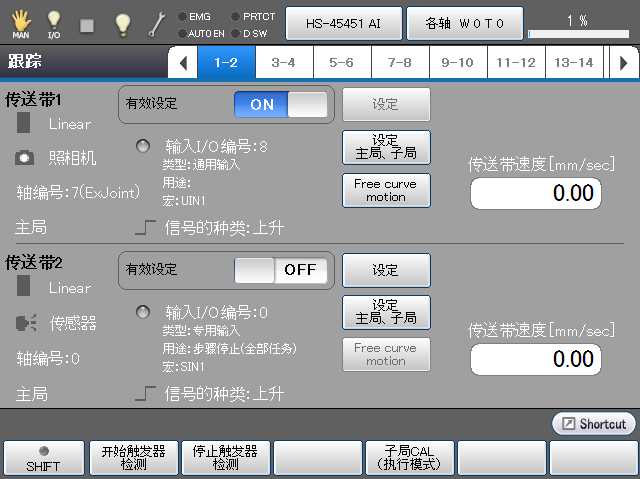
至此,1条传送带、1台机器人时的设置完成。
ID : 5361