
ID : 4930
机械臂轴有效/无效设定方法
调整附加轴时,切断机器人机械臂轴的电机电源、仅接通附加轴的电机电源,进行动作确认时,将机械臂轴设定为无效。
- 变更机械臂轴有效/无效设定时,务必重新启动控制器。否则,可能发生与编码器相关的错误。
- 将机械臂轴设定为无效时,即使接通电机电源,机器人机械臂轴的电机电源也不会接通。
设定步骤
1
按压基本画面-[F2 机械臂]-[F12 维护]-[F10 轴设定]。

显示“轴设定”画面。
2
按压[F8 机械臂有效/无效]。

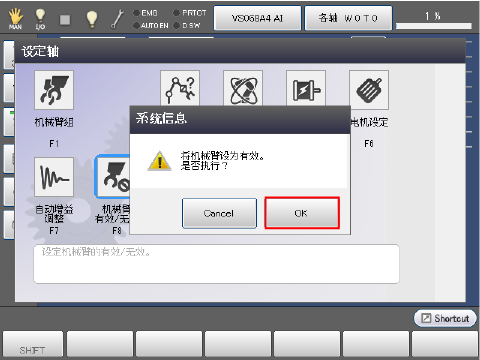
3
显示是否将机械臂设定为无效的系统讯息后,如果正确则按压[OK]。
机械臂轴(机器人本体的轴)无效。
如果按压[Cancel],则机械臂不会变为无效。

4
确认机械臂无效。
变更设定后,“机器人的当前位置信息”画面中的位置信息条显示为灰色,表示机械臂处于无效状态。

5
机械臂有效时,按照STEP1中的步骤显示“轴设定”画面,并按照STEP2和3中的要领按压[机械臂有效/无效]按钮后,按压[OK]。
机械臂轴(机器人本体的轴)有效。
6
确认“机器人的当前位置信息”画面中的位置信息条显示为蓝色,表示机械臂处于有效状态。

ID : 4930