
ID : 4856
CALSET
CALSET的定义
将控制器识别的位置信息和机器人本体的实际位置关系的校正称作CALSET。
更换电机或编码器的备份电池耗尽、编码器内的位置数据丢失时,需要进行CALSET。
执行CALSET时,将机器人本体的校正数据记录至控制器。将此数据称为CALSET数据。每台机器人的CALSET数据都不相同。
「参考“关于项目的备份”,定期对CALSET数据进行备份。
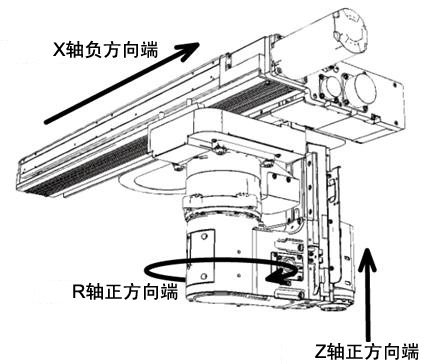
机器人出厂时的CALSET位置
|
机器人的种类 |
XR型机器人 | |
|---|---|---|
|
位 置 |
X轴+(1轴) | 负方向端 |
| R轴(2轴) | 正方向端 | |
| Z轴(3轴) | 上升端(正方向) | |
| T轴(4轴) |
根据CALSET治具设计的正方向旋转端 (「(参照“第4轴(T轴)CALSET治具的安装步骤”) |
|
|
|
||
用户更改R轴机械末端时,应将R轴机械末端恢复出厂时设置(180°的螺栓位置)后,再进行CALSET。
CALSET的步骤
1
解除要执行CALSET的轴的制动器,并置于CALSET位置。
2
通过多功能教导器进行CALSET。
操作方法请参照多功能教导器操作指南的“CALSET操作菜单的显示”。
ID : 4856
- 本页相关信息
- 第4轴(T轴)CALSET治具的安装步骤