
ID : 4846
通过WINCAPSIII变更R轴运行范围
可通过WINCAPSIII变更控制器R轴运行范围。
1
启动WINCAPSIII,并以程序员身份登录。
通过WINCAPSIII制作XR系列机器人的项目。
2
选择[项目(P)]-[属性(P)],单击“R轴范围”标记。
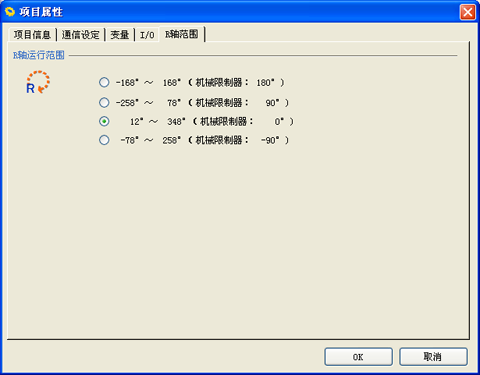
3
选择运行范围并按下[OK]。
运行范围请参照“第2轴(R轴)机械末端变更”进行选择。
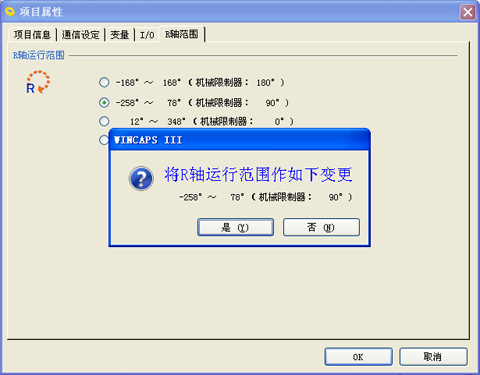
4
显示确认讯息后,确认运行范围角度和机械限动器位置,并按下[是]。
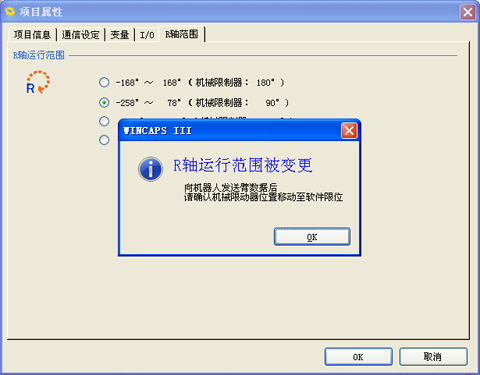
5
WINCAPSIII内的项目R轴运行范围被变更。
6
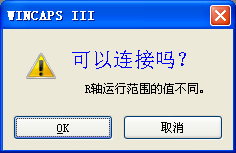
通过WINCAPSIII向机器人控制器发送项目的机械臂数据。
选择[通信(N)]-[发送接收数据(T)]。
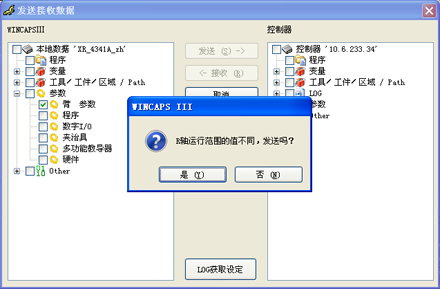
由于机器人控制器的R轴运行范围与WINCAPSIII项目的R轴运行范围数据不同,因此会显示确认讯息。
按下[OK]。
7
从[WINCAPSIII]侧的视窗中勾选<参数>内的<臂 参数>。
显示确认讯息。
请按下[是(Y)]。
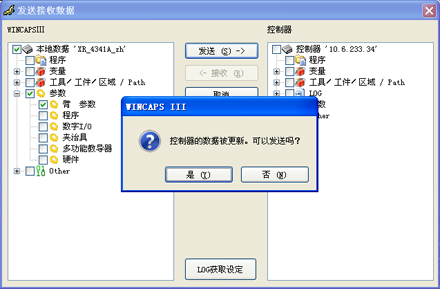
按下[发送(S)]按钮。
8
显示数据更新的确认讯息。
按下[是(Y)]。
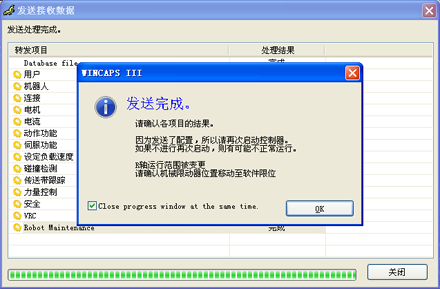
9
将R轴运行范围数据发送至机器人控制器,并更新机器人控制器的R轴运行范围数据。
移动机器人R轴,确认已调整为合适的运行范围。
ID : 4846