
ID : 4834
机器人的安装方法
1
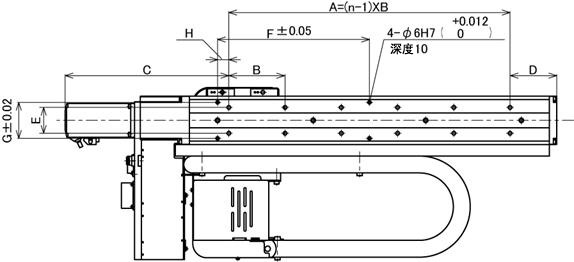
按照下图所示尺寸在安装台的固定机器人的位置上打(2×n)个螺纹孔。
| X轴行程 | 450mm | 760mm | 1060mm | |
|---|---|---|---|---|
| 图内尺寸 [mm] |
A | 500 | 900 | 1200 |
| B | 100 | 150 | 150 | |
| C | 291 | 285 | 285 | |
| D | 58 | 55 | 55 | |
| E | 46 | 50 | 50 | |
| F | 270 | 450 | 600 | |
| G | 64 | 80 | 80 | |
| H | 20 | 0 | 0 | |
| n(个) | 6 | 7 | 9 | |
| 安装用 六角带孔螺栓 |
M6x18 | M8x20 | M8x20 | |
| 紧固扭矩 | 14.7±2N·m |
35.3±7N·m | 35.3±7N·m | |
维护作业等装拆机器人本体时,仅需对装拆引起的错位进行教导修正。
2
按照“机器人的搬运方法”,临时固定到固定位置。
3
请使用内六角螺栓,以指定的紧固扭矩拧紧。
4
安装X轴的外壳。
此时,拧紧(2×n)处的所有的螺栓。如果未拧紧所有螺栓,则可能导致机器人伺服系统的振动。由于无法提供应对安装机器人引起的故障的对策及其保修,在设计安装部位时,应特别注意。
ID : 4834