
ID : 4822
机器人本体的电气配线、气动配管方法
参考以下示例,安装机器人前端安装的夹治具、工具的电气配线、气动配管。
电气配线应使用机器人用计装电缆(大京电子制造)或同等性能的电缆。
供给空气需使用通过空气过滤器(过滤精度:推荐在5μm以下)的干燥空气。在配管前向输气管内吹入干燥空气(冲洗)。
输气管内的切屑、切削油、垃圾等可能造成阀门故障。用户在安装配线、配管时不能放入第1轴的电缆拖链内。可能导致断线或破损。
电气配线和气动配管
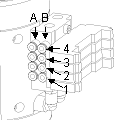
机器人配备有10根信号用配线。另外,作为选件,可追加歧管阀4系统(φ4×8)。使用歧管阀时,从阀门用配管(φ8×1)供给空气。
机器人本体的配线和配管、连接器
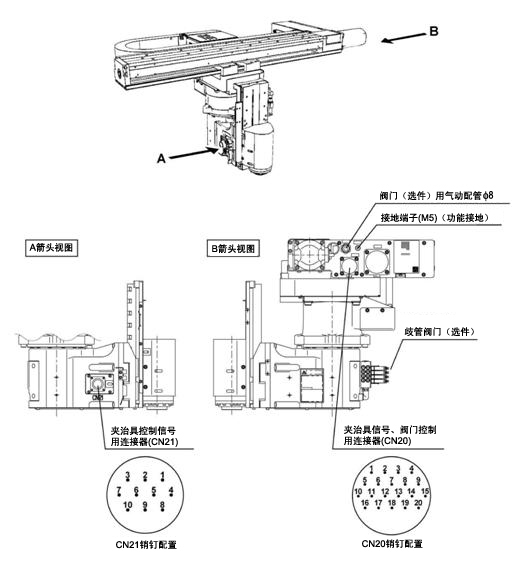
CN21的销钉编号1~10和CN20的销钉编号1~10中的相同编号相连接。每条线路的容许电流为1A。
CN20、CN21中请使用附带的连接器组件。
| 连接器组件选件号 | 选件号 | 型式和编号 | 外形图 |
|---|---|---|---|
| 410889-003* | 410877-017*(CN20用) | SRCN6A25-24S(圆形连接器) |
 |
| 410877-018*(CN21用) | JMLP1610M(L形插头连接器) (第1电子工业制造) |
 |
选件阀门用连接器和销钉配置
- CN20阀门用(选件)销钉配置和名称
| CN20销钉编号 | 名称 |
|---|---|
| 12 | +24V (*1), 0V (*2) |
| 13 | 电磁阀1A(电磁阀1) |
| 14 | 电磁阀1B(电磁阀1) |
| 15 | 电磁阀2A(电磁阀2) |
| 16 | 电磁阀2B(电磁阀2) |
| 17 | 电磁阀3A(电磁阀3) |
| 18 | 电磁阀3B(电磁阀3) |
| 19 | 电磁阀4A(电磁阀4) |
| 20 | 电磁阀4B(电磁阀4) |
*1 : NPN(源点输入、汇点输出)
*2 : PNP(汇点输入、源点输出)
- 歧管阀(选件)
阀信号与供气/排气状态
| 气动配管接头 | 阀信号 | |||
|---|---|---|---|---|
| 供气 | 排气 | 电磁阀 | 电磁阀 | |
| A | B | |||
| 1A | 1B | 1 | ON | OFF |
| 1B | 1A | 1 | OFF | ON |
| 2A | 2B | 2 | ON | OFF |
| 2B | 2A | 2 | OFF | ON |
| 3A | 3B | 3 | ON | OFF |
| 3B | 3A | 3 | OFF | ON |
| 4A | 4B | 4 | ON | OFF |
| 4B | 4A | 4 | OFF | ON |
(1A、1B为配管接头记号。)
ID : 4822