
ID : 4495
控制Log
机器人各轴的动作或电流值、荷载率等与机器人控制相关的记录。
对以下情况有效。
- 确认指定范围内机器人的动作
- 确认机器人的历年变化情况
- 根据预计荷载率制定的电机负荷的最佳标准
控制log通过指定记录间隔和记录个数可设定记录时间。
记录时机可通过多功能教导器或WINCAPSIII的手动记录和程序的操作进行记录。
使用“SysLog.Ctrl.Start”、“SysLog.Ctrl.Stop”、“SysLog.Ctrl.Clear”3个指令来操作程序的记录时机。详细内容请参照功能指南的“log功能”。
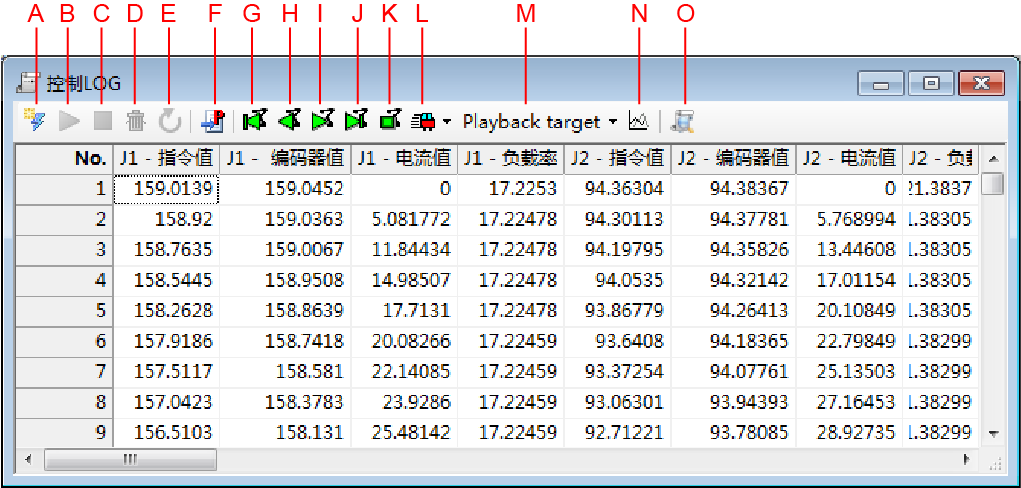
网格显示
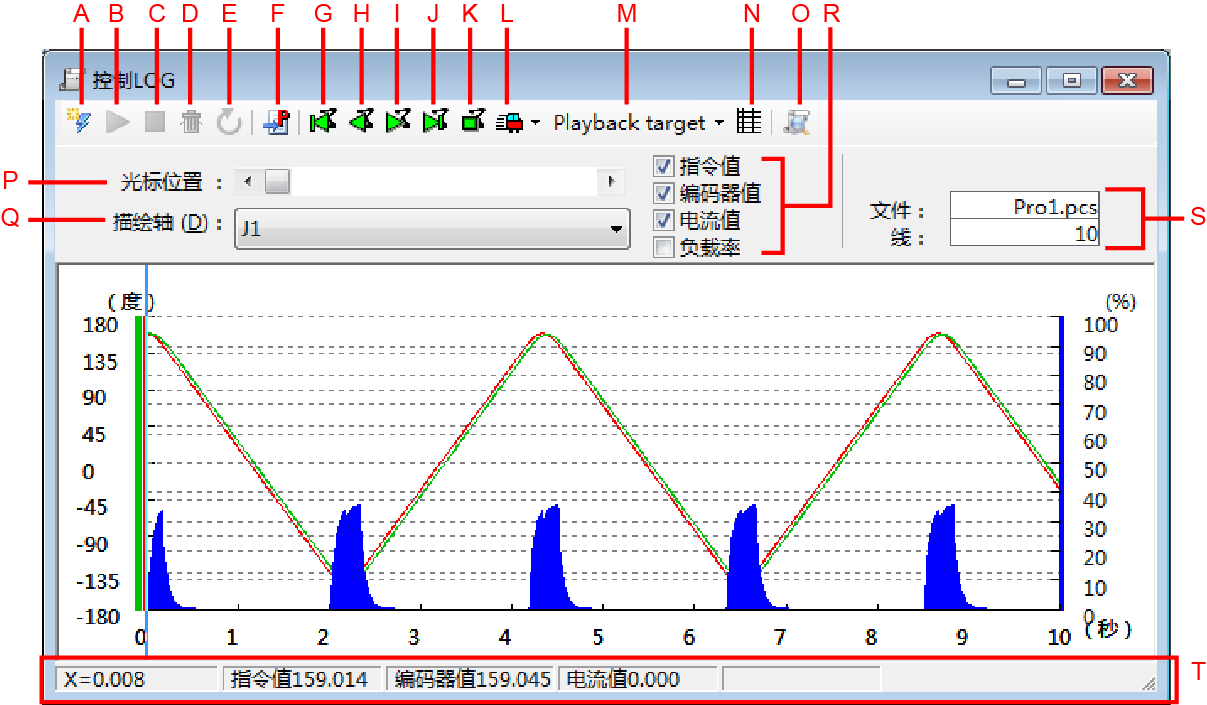
图表显示
项目说明
A:“接收”按钮
接收并显示来自机器人控制器的控制log数据。
B:“控制log开始”按钮
开始记录控制log。执行SysLog.Ctrl.Start。
C:“控制log停止”按钮
结束记录控制log。执行SysLog.Ctrl.Stop。
D:“控制log清空”按钮
清空当前保存的控制log。执行SysLog.Ctrl.Clear。
E:“控制LOG更新”按钮
更新虚拟中的控制LOG数据。
F:“转移至对应行”按钮
显示选择的log程序执行行。
G:“控制log运行再现(反步骤进给)”按钮
使用控制log,通过反步骤进给使“机械臂3D视图”上的机器人进行动作。
H:“控制log运行再现(反再生)”按钮
使用控制log,通过反再生使“机械臂3D视图”上的机器人进行动作。
I:“控制log运行再现”按钮
使用控制log,使“机械臂3D视图”上的机器人进行动作。
J:“控制log运行再现(步骤进给)”按钮
使用控制log,通过步骤进给使“机械臂3D视图”上的机器人进行动作。
K:“控制log停止”按钮
通过控制log停止动作中的机器人动作。
L:“控制LOG再生速度”
选择“机械臂3D视图”的机器人的动作再生速度条件。从以下2个条件中选择。
- 干涉检查优先
干涉检查优先在每一个log数据行再生机器人动作。 干涉检查时,有时会优先进行干涉判定,造成再生速度迟于实际动作速度。 - 实际时间优先
根据实际动作速度再生动作。(有时可能无法正确进行干扰判定。)
M:“播放对象”按钮
选择控制log的播放用数据。
N:“图表显示/网格显示”按钮
切换控制log数据的显示形式(图表形式/表格形式)。
O:“控制LOG 解析”
在输出视窗中显示解析结果(预计荷载率、最大负载率)。
- 预计荷载率
显示log范围工程连续动作时的预计荷载率。如果超过80%,则可能发生过载错误。 - 最大负载率
显示log内的最大负荷率。如果超过100%,则发生过载错误。
P:“光标位置”
移动图表上的光标位置。
Q:“描绘轴”
选择在图表上显示数据的轴。
R:显示项目选择
在图表上显示标记的项目。
S:“文件”、“线”
显示光标位置的文件名和执行行。
T:状态
显示光标位置坐标和显示在图表上的log数据的光标位置值。
log数据记录以下项目。
- 各轴的指令值
指定的记录间隔中的控制器指定的各轴角度 - 各轴的编码值
各轴的当前角度值(实际测量值) - 各轴的电流值
流经各轴电机的电流值(额定比)
RC7M中为“过电流错误检测级别比”。
- 各轴的荷载率
各轴相关的荷载率
ID : 4495