
ID : 3420
使用注意事项
在此分为下述那样的分类,记载了使用上的注意事项。
操作食品用机器人夹套套件时,请注意以下几点使用。
机器人夹套使用上的注意事项
| 注意内容 | 详细 | |||
|---|---|---|---|---|
|
更换的大致标准 |
机器人夹套为消耗品。推荐以1年为使用大致标准进行更换。另外,定期检查机器人夹套,发现损伤、破裂、绽线等时,也推荐更换。 ※本夹套的保证始于从包装取出,止于穿戴上机器人上。 |
|||
安装、拆卸时的注意事项 |
|
|||
| 使用中的注意事项 |
|
|||
| 关于保管 |
|
|||
| 其他 |
|
机器人夹治具设计上的条件
设计机器人的夹治具时,请注意以下内容进行设计。
-
最大可搬运质量、最大容许惯性惯量(惯性力矩)
以下表示机器人夹套穿戴后的机器人规格。
项目 VS-068 VS-087 最大可搬运质量 6kg 最大容许惯性惯量(惯性力矩) J4、J5周围 : 0.440kgm2
J6周围 : 0.100kgm2
请不要超过上述规格。
夹治具设计的计算中不仅要考虑夹治具,还需考虑工件、配线、配管等对法兰施加负载的所有部件。设计时不要使夹治具(包括工件)振动。
另外,计算施加在夹治具及工件等的法兰上的负荷的质量时,也请加上机器人安装用法兰的质量(0.7kg)。
例如,机器人夹治具质量=3.0kg,工件等夹治具以外的负荷=0.2kg时,施加在法兰上的负荷的总质量如下。
3.0kg + 0.2kg + 0.7kg = 3.9kg 不遵守机器人夹治具设计上的注意点时,在机器人本体的各紧固部可能发生松动、晃动,引起错位,导致机器人及机器人控制器的破损。
夹治具(包括工件)的体积较小时的重心位置分布如下图所示。
设计夹治具时,请参考下图,设计夹治具。
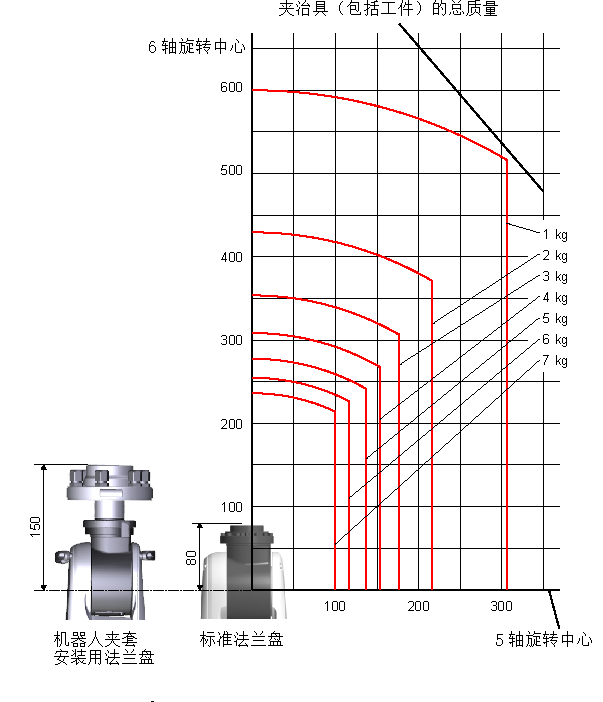
-
工具的位置
安装机器人夹套安装用法兰,机器人夹治具安装面位于朝趋近矢量方向移动70mm的位置。
进行工具设定时,请朝趋近矢量方向加上70mm后设定。
-
机器人夹治具安装面的条件(是水滴可能附着在机器人夹治具周边的环境时)
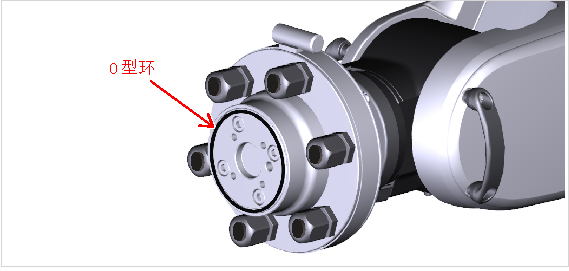
为了压瘪机器人夹治具安装用法兰A的O型环的整周,请使夹治具的安装面的外形为直径59mm以上的大小。
另外,请以Rz6.3(Ra1.6)设计夹治具侧的O型环接触面的表面粗糙度。另外,另外,接触精加工请不要设置进给。不满足条件时,水滴进入机器人夹套内部,可能导致机器人本体的故障。
-
在机器人夹治具的宽度超过70mm的产品上,从电缆地线向外部引出用户配线、配管时,需要注意。此时,如果以拉直用户配线、 配管的状态朝外部拉出,将撞击机器人夹治具,被迫曲折。
如果在急剧弯曲的状态使其曲折,可能导致损伤、性能变差。 请在用户配线、配管与机器人夹治具之间夹上衬垫,为缓慢弯曲而进行设定。
详细内容请参照夹治具尺寸的注意点(PDF:276KB).
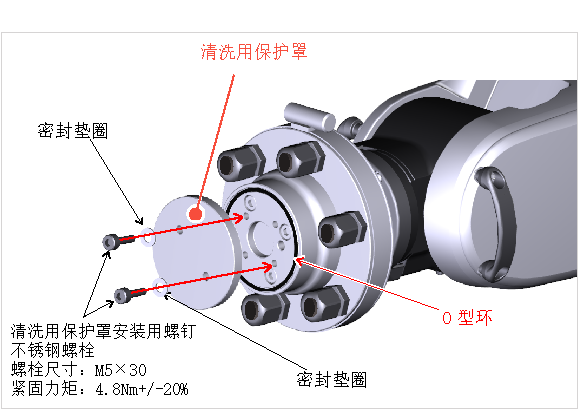
在拆卸机器人夹治具的状态进行机器人夹套的清洗·消毒
拆卸机器人夹治具进行清洗·消毒时,如果直接进行,液体可能浸入内部,因此请务必如下图所示安装清洗用保护罩后进行清洗·消毒。
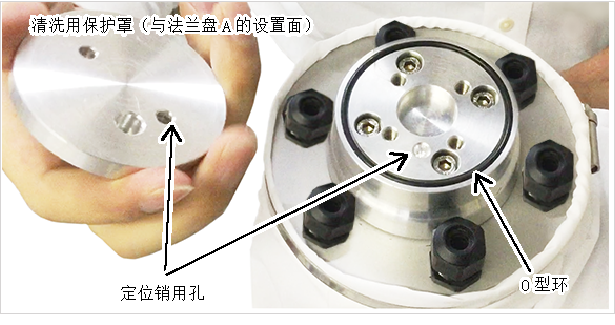
另外,安装清洗用保护罩时,请确认在机器人夹套安装用法兰A上一定安装了O形环。
清洗用保护罩作为选件销售 (编号:410389-317*)。
在清洗用保护罩的与机器人夹套安装用法兰A的接触面上,开设了定位用孔。安装清洗用保护罩时,对准机器人夹套安装用法兰A的定位用孔安装。
- 在机器人上穿戴了机器人夹套的情况下进行清洗时,请务必擦拭干净。
- 请不要在清洗以外的目的使用清洗用保护罩。
ID : 3420