
ID : 3394
Pylon5的设定方法
说明Basler公司的GigE相机的设定方法。
使用pylon IP Configurator,并进行IP地址及ID设定和触发模式设定。
在触发模式下使用相机。
触发模式OFF时,不能接在相机上。
安装方法
1
从Basler 公司的网站下载“Windows 用软件套件Pylon 5.0.12”。
2
双击下载的“Basler_pylon_5.0.12.11830.exe”。
3
下图的画面打开后,勾选“I agree”,单击“Next”按钮。
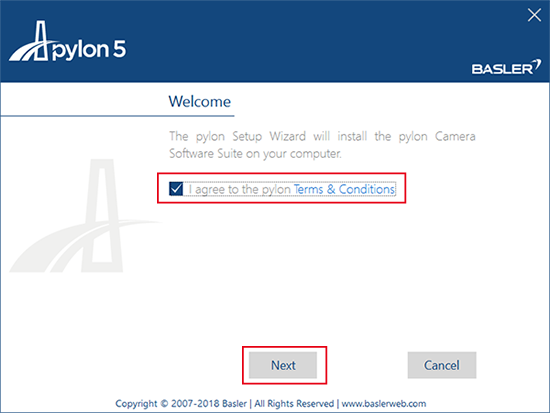
在以下所有步骤中,单击“Cancel”按钮时即中止安装。
4
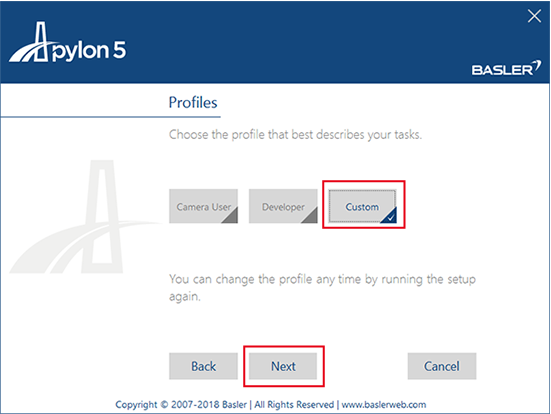
选择“Custom”,单击“Next”按钮。
5
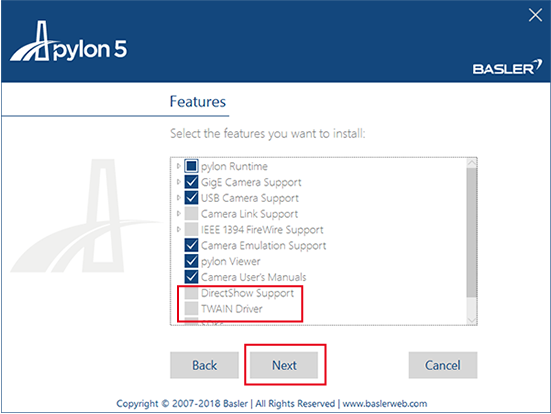
从已经默认勾选的功能中,取消“DirectShow Support”、“TWAIN Drive”、“Firmware Updater”的勾选,单击“Next”按钮。
6
确认安装位置的目录,单击“Next”按钮。
单击“Change”按钮后,可以变更安装位置的目录。
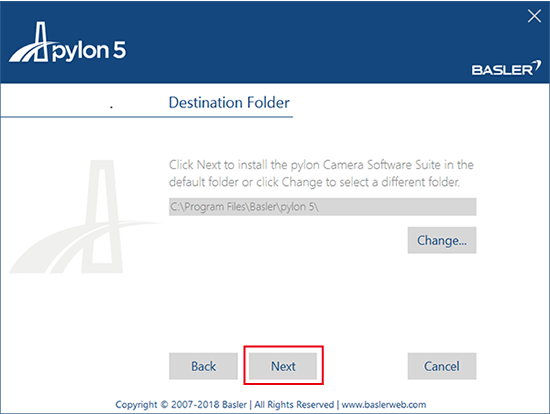
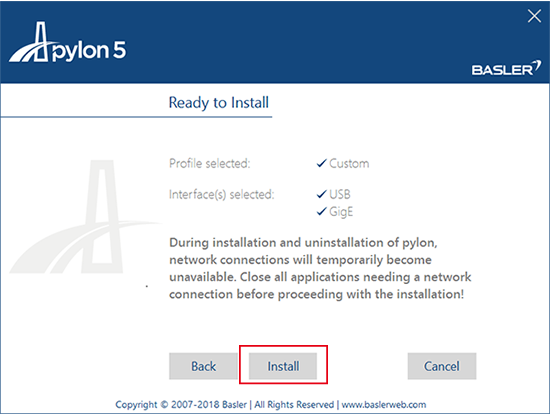
7
单击“Install”按钮即开始安装。
IP地址、ID的设定
1
启动pylon IP Configurator。
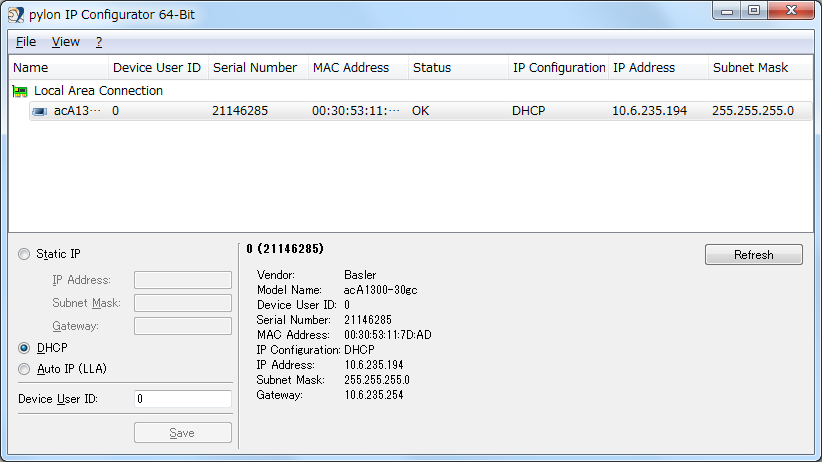
2
选择设定IP地址、ID的相机。
3
输入“IP地址”、“子网掩码”、“网关”、“Device User ID”,并按压“save”按钮。
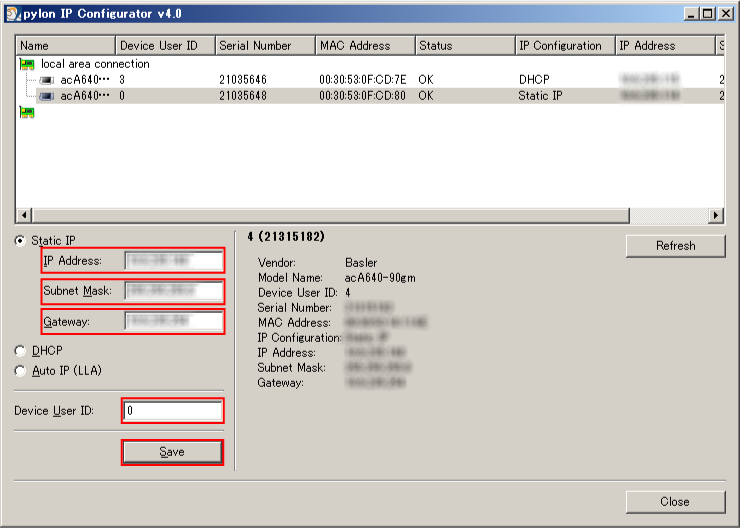
Device User ID的范围为0~4。
用户ID 0~4对应控制器图像存储区域的ID 201~205。
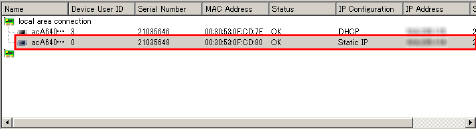
使用多台相机时,请勿重复设定ID。
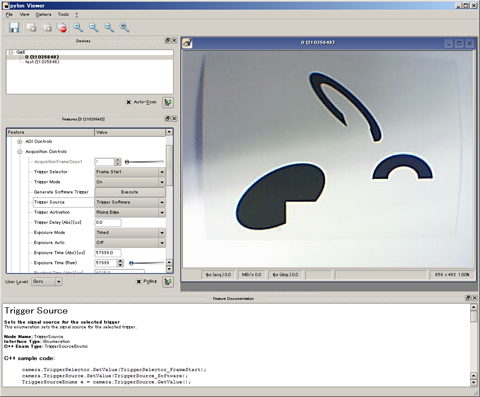
触发模式的设定
1
启动pylon Viewer。
2
将“User Level”设定为Expert以上。
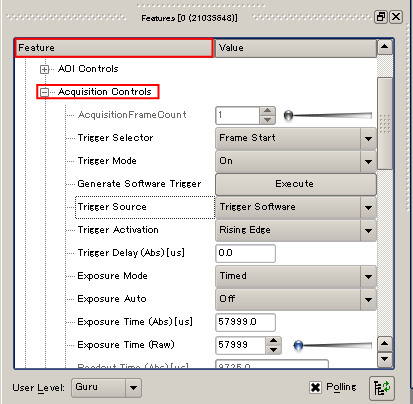
3
选择“Feature”中的“Acquisition Controls”,单击+打开菜单。
4
将“Trigger Mode”设定为“On”。
根据使用的模式,选择“Trigger Source”。
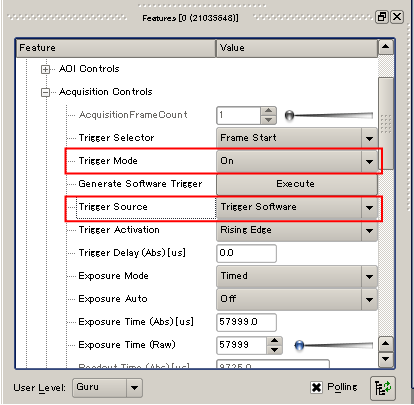
| 项目名 | 内容 |
|---|---|
| Trigger Software | 软件触发 |
| Line* | 外部触发(硬件触发) |
如果关闭Trigger Mode,则可能会导致以下故障。
- 不能连接相机。
- 机器人控制器的CPU和网络负载过重。
5
设定其他的使用条件(快门、速度、增益等)。
6
通过“Configuration Set Selector”选择保存设定的组合。
按压“User Set Save”的“Execute”,保存设定的条件。
如果不执行该操作,相机设定不被保存。
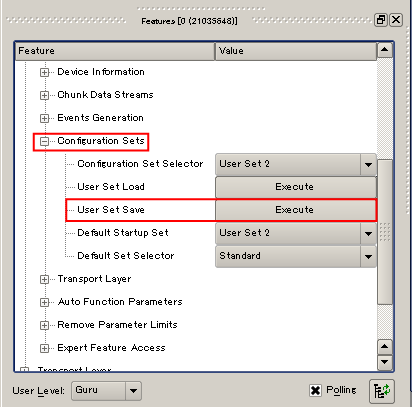
接通相机电源时,按照“Default Startup Set”中指定的组合(上图中“User Set2”)的设定启动。
Pylon插件的设定方法
特此说明一下如何利用装有Pylon5的PC通过ORiN或RCVision来连接Basler相机的方法。
1
以管理者权限启动命令提示符,运行以下指令。
regsvr32 "C:\ORiN2\CAO\ProviderLib\Basler\Pylon5\GigE\Bin\CaoProvPylon5GigE.dll"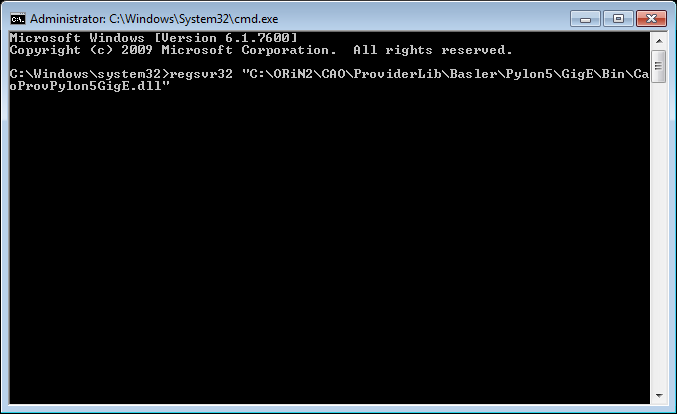
2
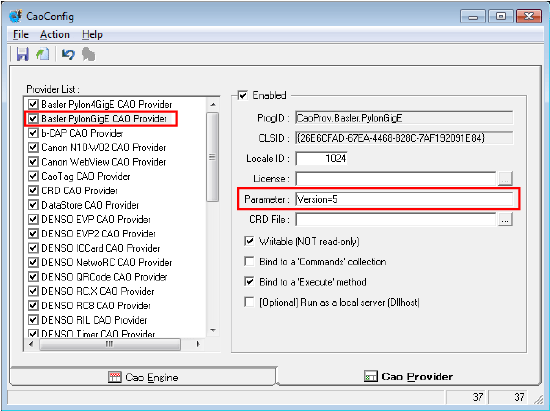
从开始菜单启动“CaoConfig”,从[Cao Provider]选项卡的[Provider List]中选择[Basler PylonGigE CAO Provider]。
在插件参数中输入”Version=5”,并选择[File]菜单中的[Save]后保存设定。
操作路径:开始菜单- [ORiN 2] - [CAO] - CaoConfig
使机器人控制器识别相机
想使机器人控制器自动识别相机时,请在接通机器人控制器的电源前,向相机供电。如果机器人控制器先于相机启动,不能自动识别相机。
机器人控制器已经启动等,相机未被自动识别时,请手动识别。以下阐述操作步骤。
- 按内置视觉菜单的[F6 切断],结束内置视觉功能。
- [F6 切断]切换为[F6 连接]。按[F6 连接],使其识别相机。
详细情况请参照“内置视觉的显示、操作”。
不能取得相机图像时
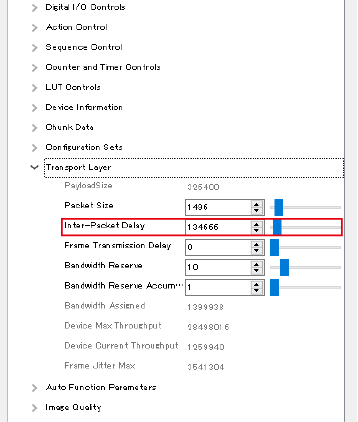
使用Basler公司的GigE相机时,如果无法通过内置视觉画面等获取图像,可以通过在pylon Viewer中将“Inter-Packet Delay”的设定值设定得比当前值大来改善。
更改设定时,请勿将“Inter-Packet Delay”的值设得过大。
如果增大“Inter-Packet Delay”设定值,则从相机传输数据可能会变慢,从而导致帧速率降低。
1
选择“Feature”中的“Transport Layer”,打开菜单。
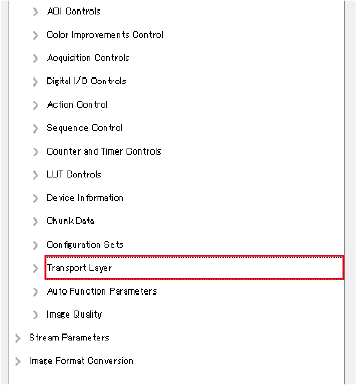
2
将显示的参数中的“Inter-Packet Delay”的值设定为大于当前值的值。
ID : 3394