
ID : 2967
装置控制
机器人控制器的装置控制利用下图所示的状态转移执行,利用Controlword(J1)-(J8)(Index:0x6040,0x6840,0x7080,0x7880,0x8080,0x8880,0x9080,0x9880)控制状态。
机器人控制器的装置状态可使用Statusword(J1)-(J8) (Index:0x6041,0x6841,0x7081,0x7881,0x8081,0x8881,0x9081,0x9881)进行监视。
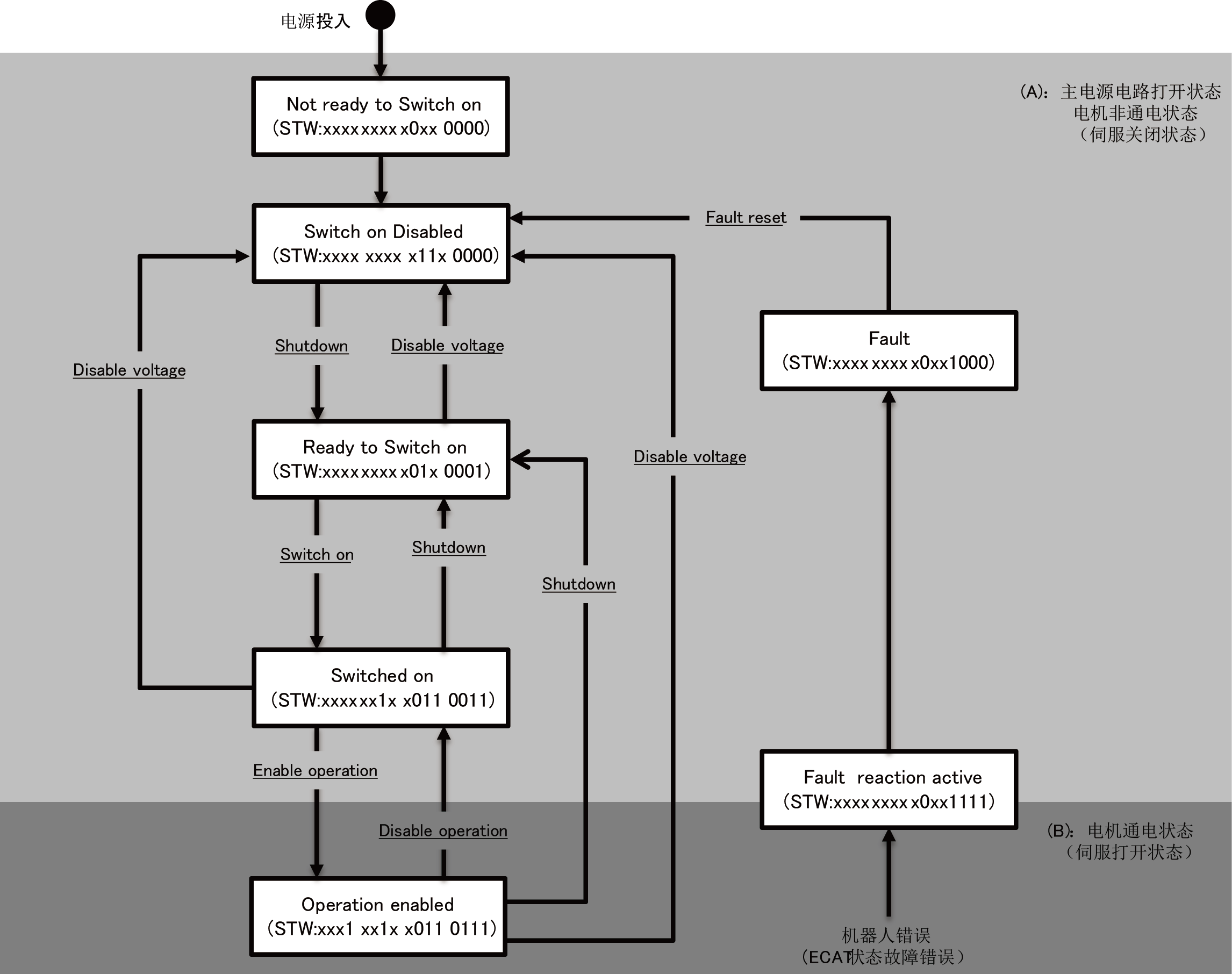
- 被白色四边形围起的字符表示状态。
- STW表示Statusword (J1)-(J8) (Index:0x6041,0x6841,0x7081,0x7881,0x8081,0x8881,0x9081,0x9881)。Statusword (J1)-(J8)全部都是相同的值。轴有效无效设为为无效的轴固定为0。
- 下划线部分是Controlword(J1)-(J8) (Index:0x6040,0x6840,0x7080,0x7880,0x8080,0x8880,0x9080,0x9880)的控制指令。轴有效无效设为有效的轴中,全轴的状态利用至少1个轴的控制指令的变化转移。 (全轴的状态利用各个轴的Controlword的逻辑乘转移)
- 当多个轴的Controlword不同时,数字小的轴优先。 例:当Controlword(J1)与Controlword(J2)不同时,Controlword(J1)优先。
Controlword的比特(状态机控制编码)
| 比特 | 状态 | 说明 |
|---|---|---|
| 0 | Switch on | 请参照下表的<比特0~3、7>的详细内容 |
| 1 | Enable voltage | |
| 2 | Quick stop | |
| 3 | Enable operation | |
| 4 | - | 预约 |
| 5~6 | Cycle counter | 请参照下表的<比特5、6>的详细内容 |
| 7 | Fault reset | 0→1:错误复位 请参照下表的<比特4~9>的详细内容 |
| 8~15 | - | 预约 |
比特0~3、7的详细内容
| 指令 | Controlword比特 | ||||
|---|---|---|---|---|---|
| 比特7 | 比特3 | 比特2 | 比特1 | 比特0 | |
| Shutdown | 0 | X | X | 1 | 0 |
| Switch on | 0 | 0 | X | 1 | 1 |
| Switch on + Enable operation | 0 | 1 | X | 1 | 1 |
| Disable voltage | 0 | X | X | 0 | X |
| Disable operation | 0 | 0 | X | 1 | 1 |
| Enable operation | 0 | 1 | X | 1 | 1 |
| Fault reset | 0→1 | X | X | X | X |
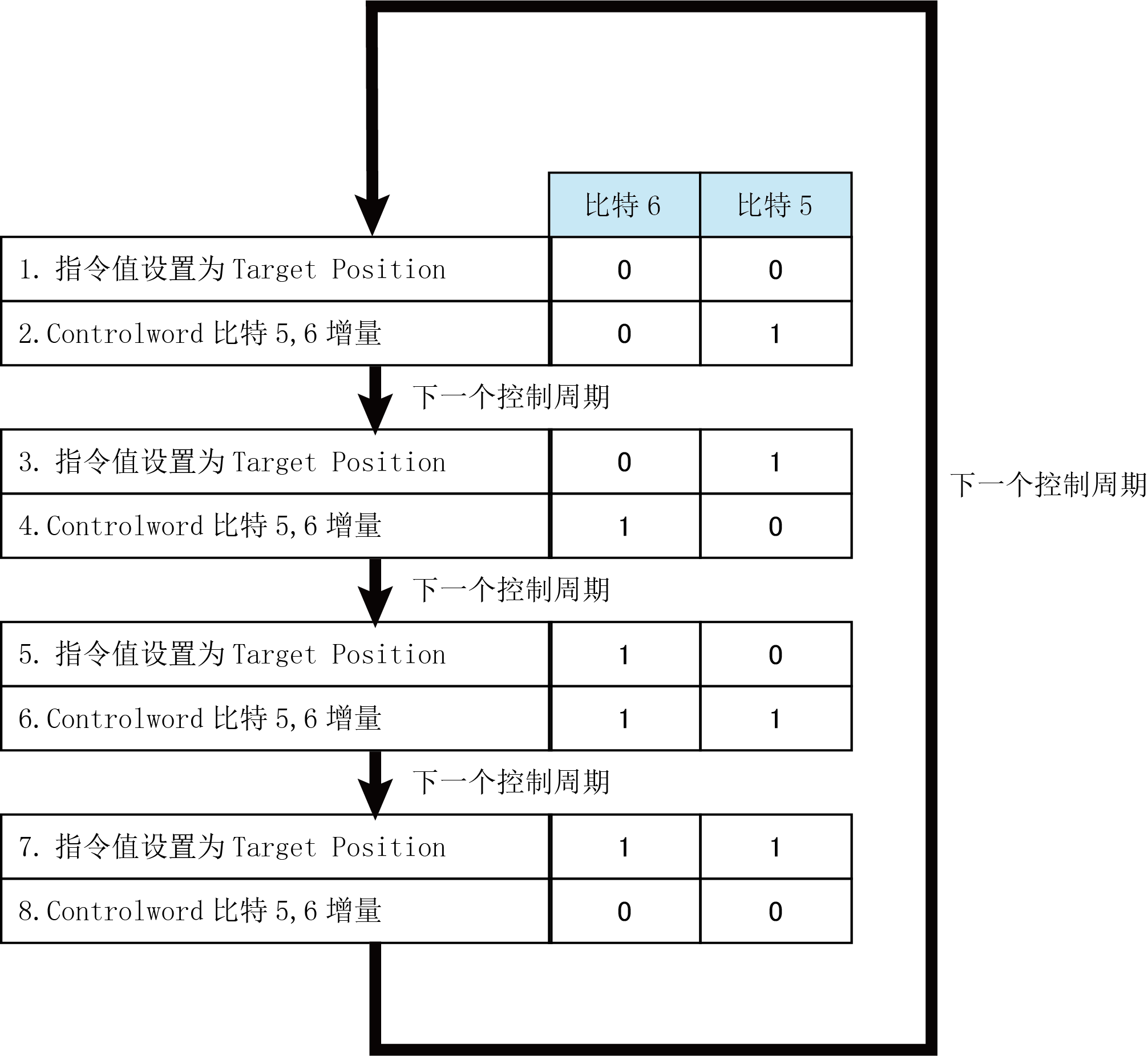
比特5、6的详细内容
将SlaveMotion同步选项设为通知有效,在比特5、6的Cycle counter进行下述数字的转移,可在作为子局的机器人控制器内部进行指令值插补。
每次用具有轨道生成的EtherCAT Master功能的控制器更新指令值时,请增加Cycle counter的增量值。 按照250us、500us进行通信时,必须进行这一处理。
Statusword的比特
| 比特 | 状态 | 说明 |
|---|---|---|
| 0 | Ready to switched on | 请参照下表的<比特0~7>的详细内容。 |
| 1 | Switched on | |
| 2 | Operation enabled | |
| 3 | Fault | |
| 4 | Voltage enabled | |
| 5 | Quick stop | |
| 6 | Switch on disabled | |
| 7 | Warning | |
| 8 | - | 预约 |
| 9 | Remote | Controlword被处理。 |
| 10,11 | - | 预约 |
| 12 | Drive follows the command value | 0:指令值无效 1:指令值有效 |
| 13,14 | - | 预约 |
| 15 | Critical error | 0:未发生等级5错误 1:发生等级5错误 |
比特0~7的详细内容
| 比特 | 比特 | 比特 | 比特 | 比特 | 比特 | 比特 | 比特 | 驱动器状态 |
|---|---|---|---|---|---|---|---|---|
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| X | 0 | X | X | 0 | 0 | 0 | 0 | Not ready to switch on |
| X | 1 | 1 | X | 0 | 0 | 0 | 0 | Switch on disabled |
| X | 0 | 1 | X | 0 | 0 | 0 | 1 | Ready to switch on |
| X | 0 | 1 | X | 0 | 0 | 1 | 1 | Switch on |
| X | 0 | 1 | X | 0 | 1 | 1 | 1 | Operation enabled |
| X | 0 | X | X | 1 | 1 | 1 | 1 | Fault reaction active |
| X | 0 | X | X | 1 | 0 | 0 | 0 | Fault |
| X | X | X | 1 | X | X | X | X | Main power on |
在机器人控制器内发生了等级5错误时(Statusword的比特15为1),不能从作为EtherCAT主局的外部机器清除错误。请连接多功能教导器或者通过WINCAPSIII的监视功能确认错误内容,解决发生错误的问题。
ID : 2967