
ID : 2952
EtherCAT主局板(外部轴)的安装
EtherCAT主局板(外部轴)内置在机器人控制器的扩展插槽上。扩展槽有2个,安装在其中的PCI板用连接器上。安装方法请参照“增设板的安装”。
- 在安装板之后如果接通电源,则在多功能教导器上显示“新装置的驱动程序安装完成。请按“OK”并停止系统运行。”。”如果按“OK”,机器人控制器关机,在显示“It is now safe to turn of your computer.”后,重新接通电源。
- 为了安全起见,并防止机器发生故障,请拔下电缆,或者在连接前拔下控制器的电源电缆或切断设备侧至控制器的供电。
可在PCIe插槽上增设现场总线种类用途的板(EtherNet/IP Adapter板、EtherACT子局板等)。但是,需要将EtherCAT主局板(外部轴)安装的旋转开关改为0以外。
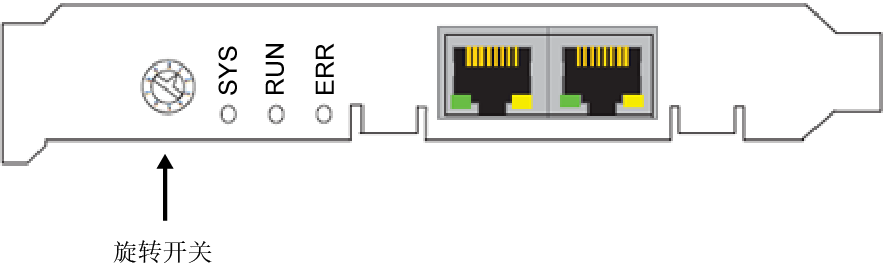
另外,请用下述方法将参数改为用旋转开关设定的值。
EtherCATMaster板ID
| EtherCAT Master板ID | 设定范围 | 默认值 |
|---|---|---|
| 值 | 0~9 | 1 |
通过多功能教导器变更时
1
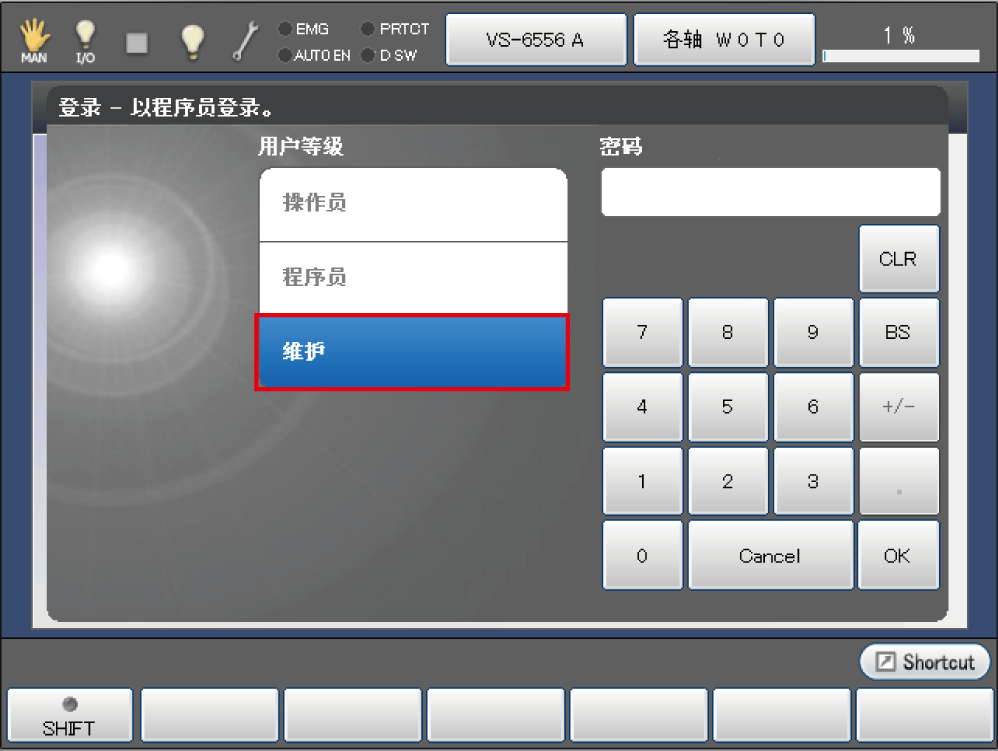
基本画面-[F6 设定]-[F1 登录]
以用户等级“维护”登录
2
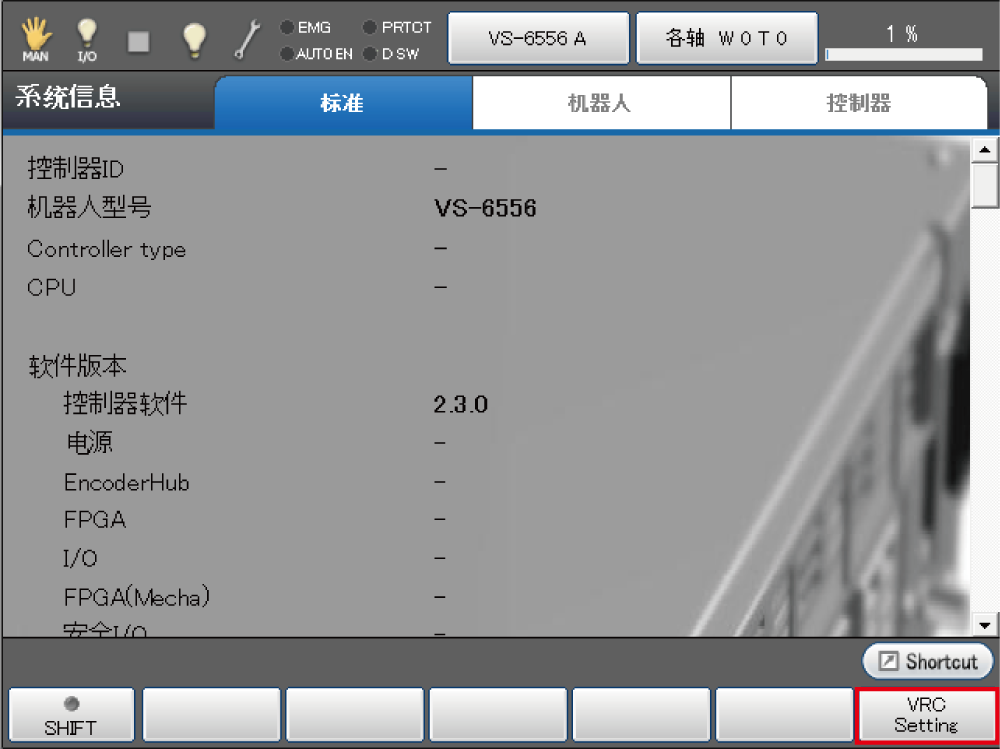
基本画面-[F6 设定]-[F2 系统信息]-[F6 VRC设定]
3
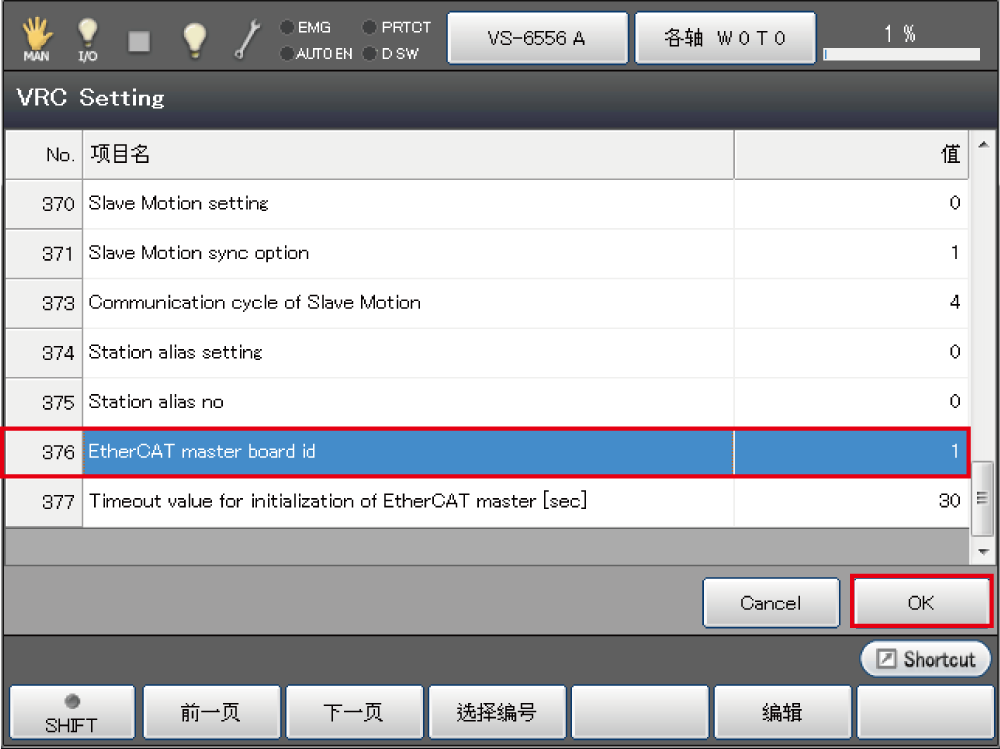
向“376:EtherCATMaster板ID”输入用旋转开关设定的值
4
重启机器人控制器
通过WINCAPSIII变更时
1
以用户等级“1-程序员”登录
2
[项目(P)]-[参数(T)]
3
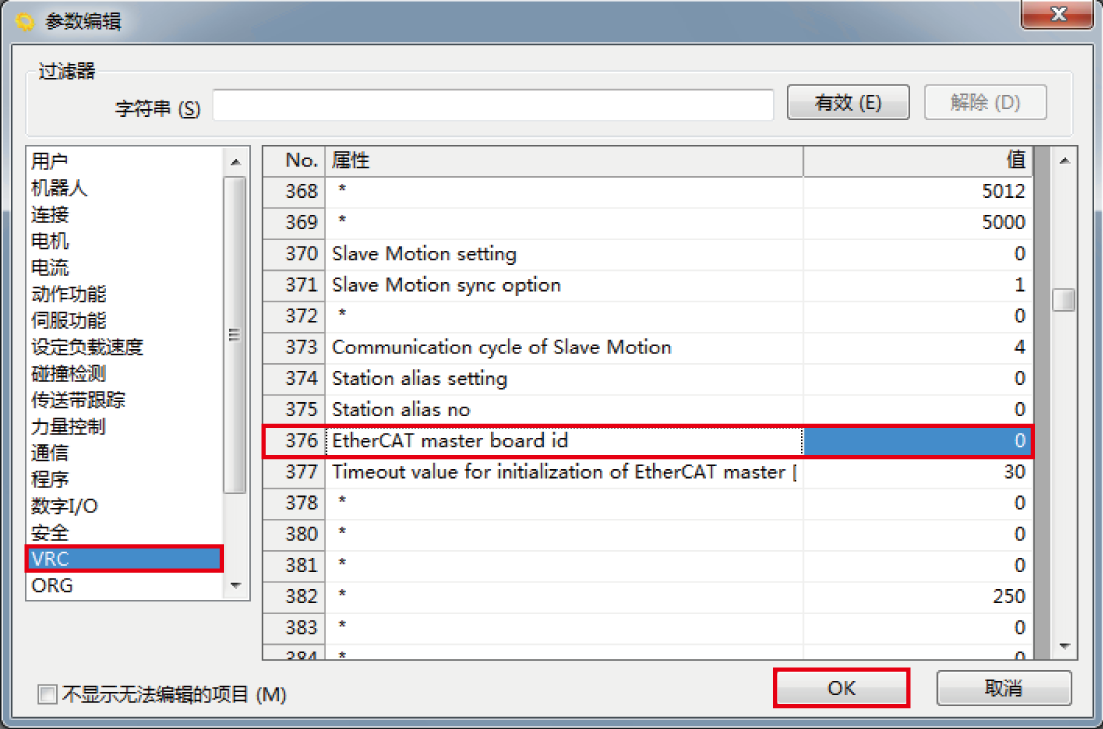
向[VRC] - “376:EtherCATMaster板ID”输入用旋转开关设定的值
4
发送给机器人控制器后,重启
ID : 2952