
ID : 2701
系统构成
以下表示使用原点复位向导功能时的系统构成。
使用原点复位向导功能时,需要与RC8系列机器人控制器连接的RC8扩展功能IPC组件。
系统构成图
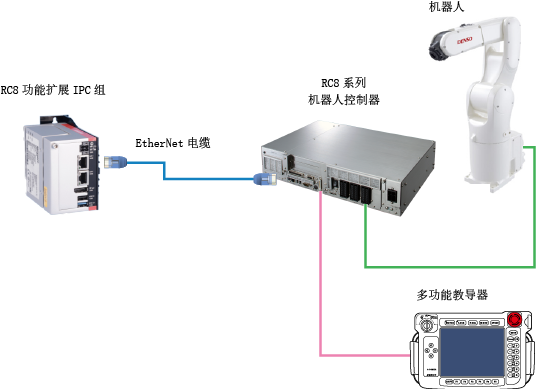
RC8扩展功能IPC组
RC8扩展功能IPC组件(以下称为“IPC组件”)是进行原点复位动作路径的计算,将计算结果发送至RC8系列机器人控制器 (以下称为“机器人控制器”)的装置。
对于1台IPC组件,最多可连接254台机器人控制器。
IPC组件无法同时计算多台机器人控制器的原点复位路径。
例如,假设机器人控制器A和机器人控制器B连接过IPC组件。当IPC组件正在计算机器人控制器A的原点复位路径时,如果机器人控制器B向IPC组件请求计算原点复位路径,则机器人控制器B上会发生Level1的错误。
原点复位路径的计算时间取决于控制LOG的记录时间(最大 240[s])及机器人的动作。已获取最大的记录时间时,计算时间的一例为约30[s]。
请考虑以下项目决定机器人控制器的网络内连接的IPC组件的台数。
出厂时UWF已设定为OFF。
在出厂状态下,Windows升级及安全设定可能不是最新状态,因此使用前建议进行升级。
ID : 2701
- 本页相关信息
- RC8扩展功能IPC组