
ID : 2686
子局控制设定
参数的设定可在以下画面上进行。
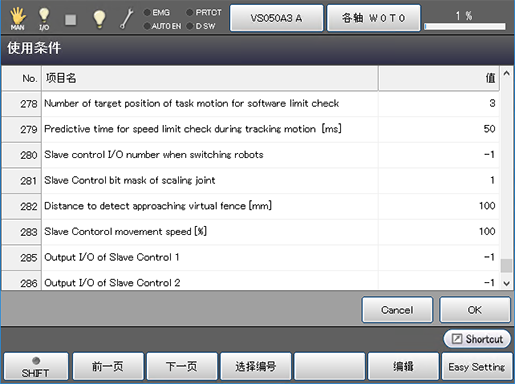
操作路径:[F2 机械臂] - [F6 辅助功能] - [F1 使用条件]
COBOTTA按钮设定
| 编号 | 参数名 | 初始值 | 内容 |
|---|---|---|---|
| 285 | 子局控制 输出I/O1 |
无效 | 设定当按下COBOTTA 的夹治具正按钮时,要切换ON/OFF的I/O 编号。设定了“设定-1” 时变为无效。 |
| 286 | 子局控制 输出I/O2 | 无效 | 设定当按下COBOTTA 的夹治具负按钮时,要切换ON/OFF的I/O 编号。设定了“设定-1” 时变为无效。 |
其他设定
| 编号 | 参数名 | 初始值 | 内容 |
|---|---|---|---|
| 280 | 子局控制 机器人切换时I/O编号 | -1 | 对当前的机器人被选择为子局机器人时输出的I/O进行设定。 指定了“-1”时变为无效。 |
| 281 | 子局控制定标轴掩码 | 1 | 设定是否根据子局机器人的最大动作范围,对COBOTTA发送来的追踪目标位置进行定标。 |
| 282 | 虚拟栅栏接近判定距离[mm] | 100 | 在COBOTTA侧启用了当子局机器人接近虚拟栅栏时,在COBOTTA侧产生反作用力的功能时,设定从虚拟栅栏离开多少距离后作为接近检出。 |
| 283 | 子局控制 动作速度[%](*1) | 100 | 设定子局机器人追踪主局机器人时的动作速度。 追踪速度小时,子局机器人的动作可能变得不稳定,无法正常追踪。 |
*1 : 与COBOTTA连接中,即使变更本参数的值,设定也不会反映。与COBOTTA再次连接时反映。
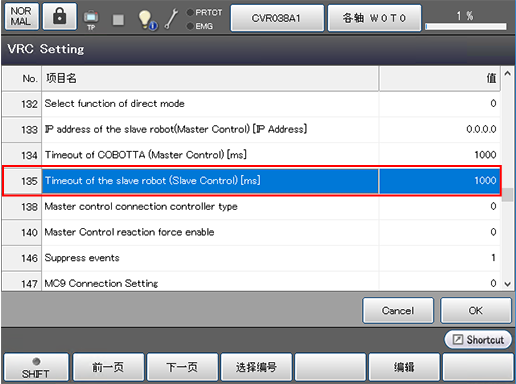
超时时间的设定
超时时间极端小时,与COBOTTA连接时会发生错误。
连接前,请从VRC设定画面上调整 No.135[子局机器人侧超时时间(子局控制)]的值。推荐设定为1000[ms]。
仅在维护登录时,可设定编辑[F6 VRC设定]。
操作路径 : [F6 设定] - [F2 系统信息] - [F6 VRC设定]
ID : 2686