文字大小
<< 向前 下一页 >>
ID : 2288
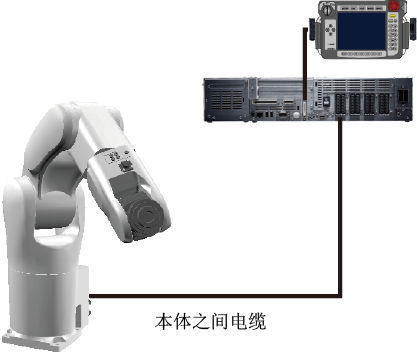
由机器人单独构成时,如下图所示,只由1台控制器组成,不与外部机器通信。
由多台机器人构成时,使用协调功能,检测机器人之间的碰撞。关于协调功能的系统构成,请参照协调功能指南的“系统构成”。