
ID : 2154
协调用程序的创建流程
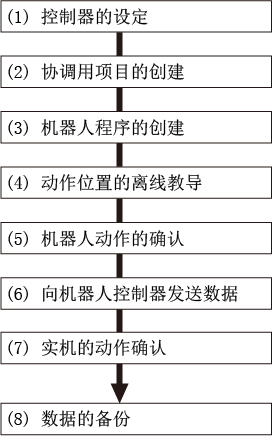
(1) 控制器的设定
根据协调功能指南的设置步骤,设置主局和子局控制器。
(2)协调用项目的创建
使用协调控制、双臂工具,从(1)中设置的控制器中接收数据并创建协调用项目。
通过原有项目创建时,以与实机一致的内容创建IO装置和变量的使用个数。
(3) 机器人程序的创建
在WINCAPSIII打开协调用项目,创建主局机器人的动作程序。
(4) 动作位置的离线教导
使用机械臂操作和变量移动功能,教导主局机器人的动作位置。
(5) 机器人动作的确认
使用仿真和调试功能确认创建程序的动作。
(6) 向机器人控制器发送数据
使用协调控制、双臂工具,将协调用项目整体发给控制器。
协调控制、双臂工具统一将项目整体统一发给控制器。只发送程序及变量这些特定数据时,请和以前一样使用WINCAPSIII。
(7) 实机的动作确认
使用实机,最终确认动作位置的精确教导以及调整与外围机器的时机等机器人程序。
(8) 数据的备份
使用协调控制、双臂工具,接收机器人控制器内的数据,预先备份协调用项目。
协调控制、双臂工具统一从控制器接收项目整体。只接收程序及变量这些特定数据时,请和以前一样使用WINCAPSIII。
ID : 2154