
ID : 2155
WINCAPSIII、EMU的使用注意事项
协调控制、双臂工具
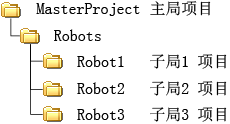
协调用项目的构造
协调用项目的构造如图所示,主局机器人的项目内包含子局机器人的项目。
Robots以下的文件夹名是固定的。
协调用项目的创建
原则上,请从控制器接收并创建协调用项目。通过原有项目创建时,选择IO类型和变量内容与实机一致的项目。
协调用项目的发送
协调项目工具统一发送项目整体。由于发送数据将覆盖全部数据(变量、程序和IO类型等参数),因此请注意。
个别数据的发送接收
只接收发送程序及变量等特定数据时,请和以前一样使用WINCAPSIII。
WINCAPSIII
子局机器人的项目
使用WINCAPSIII打开子局机器人的项目时,请选择协调用项目内的“Robots¥Robot*” 文件夹下面的子局机器人项目文件(wpj)。
子局机器人的限制事项
选择子局机器人时,下述功能无效。
- [通信] - [连接状态] - [在线(监视/调试)]功能
- [调试] - [仿真模式]功能
- 机械臂操作功能
子局机器人的监视器
子局控制器的监视器请使用EMU。
EMU
子局机器人的追加
不能通过单体追加子局机器人中设定的项目。仿真协调系统时,请追加协调用项目的主局机器人。也自动读取项目内包含的子局机器人。
机器人移动的项目
通过WINCAPSIII进行机器人移动([臂建模画面] - [机器手数据移动])的项目不可使用。
IO链接功能
IO链接功能不支持子局机器人。
ID : 2155