
ID : 2011
多台机器人的变量移动
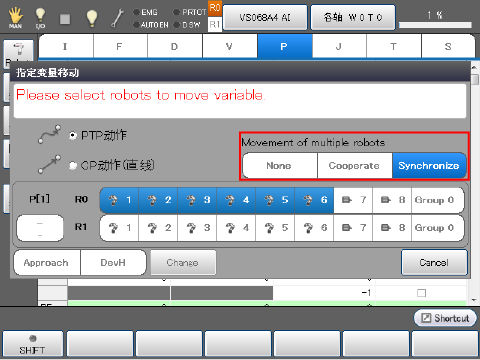
就将多台机器人同时移至各自的变量位置的方法进行说明。
“变量指定移动”画面之前的操作与前导机器人变量移动的STEP1~2相同。
3
将多台机器人的动作设定为“同步”。
4
选择使前导机器人移动的轴(机器人轴、附加轴)。

5
选择使第2台机器人移动的轴(机器人轴、附加轴),或按压变量编号的空栏位置。

未指定为跟踪的机器人也可通过变量移动进行同步动作。
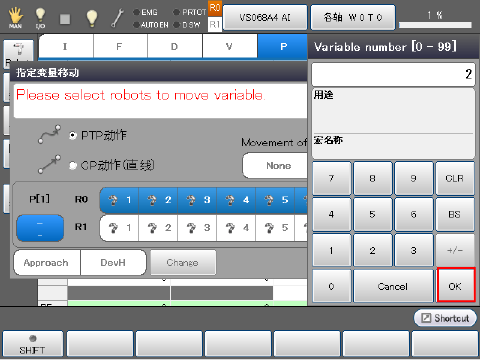
6
显示数字键后,输入变量编号并按压OK。
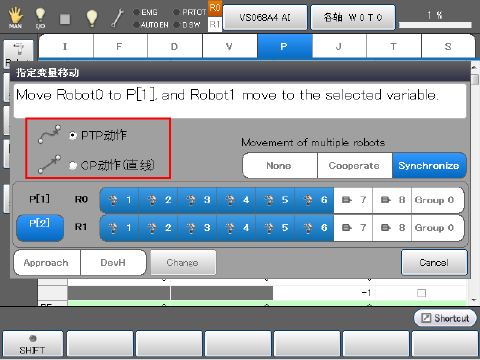
7
选择插补方法。
8
按压教导器的双重安全开关和OK键,移动机器人。
选项功能
通过“变量指定移动”画面的“趋近”按钮指定趋近距离后,所有的机器人移至指定的趋近长度位置。通过“DevH”按钮指定坐标(X、Y、Z、Rx、Ry、Rz)后,所有的机器人从变量位置移至偏移指定坐标量的位置。
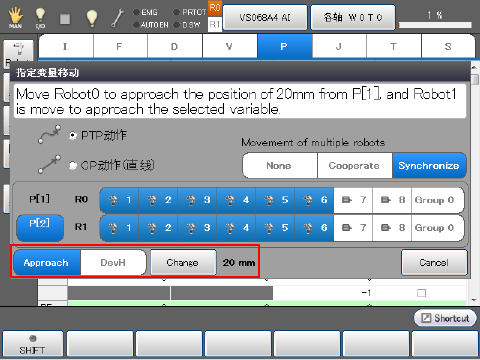
已设定趋近距离或坐标(X、Y、Z、Rx、Ry、Rz)时,可通过“变更”按钮变更值。
任一机器人均不可在未选择机器人轴时进行趋近移动、DevH移动。
ID : 2011