文字大小
<< 向前 下一页 >>
ID : 1956
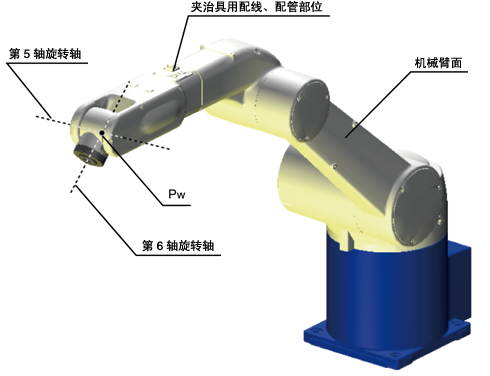
关于臂、肘、手腕、第6轴的各种形态的边界条件进行说明。
使用第5轴的旋转轴和第6轴的旋转轴交叉点“Pw”的位置进行臂、肘、手腕的边界的判断。
各种形态的边界位置称为特异点。
像MOVE、APPROACH、DEPART等进行CP动作的指令是不能通过特异点的附近的。
轨道上有处于特异点附近时,有可能发生84204060号台(指令速度过大)或者83204070号台(软件限位超程)而造成机器人停止。