
ID : 1955
形态的注意事项
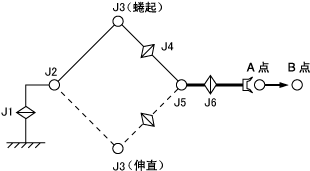
执行CP动作指令时,在出发点时的位置和姿势即使相同,但如果臂、肘、手腕的形态不同,各个轴也会进行不同的动作移向目标位置。因此,形态在出发点不同的CP动作,要事前对各个轴的设备等是否有干扰进行确认之后,再实施移动。
但是,在工具前端所看到的移动路径,即使形态改变也是相同的。
机器人的结构上,对于任意的1个位置和姿势,并不都能采取所有形态。
根据位置和姿势,有时只能采取例如反手、蜷起、不翻动的形态。
(在通常的动作范围内,大多是只能采取反手、蜷起、不翻动或者反手、蜷起、翻动的2种形态。此外,4轴形态大多是单4。)
ID : 1955