
ID : 1939
位置数据
位置数据,是指机器人的法兰中心(工具定义有效时为工具前端)的位置与表示此时机器人姿势的7要素的基准坐标系(工件坐标系有效时为工件坐标系)的数据。
表示机器人的当前位置及移动目标位置时,包含机器人的姿势在内也使用该位置数据。
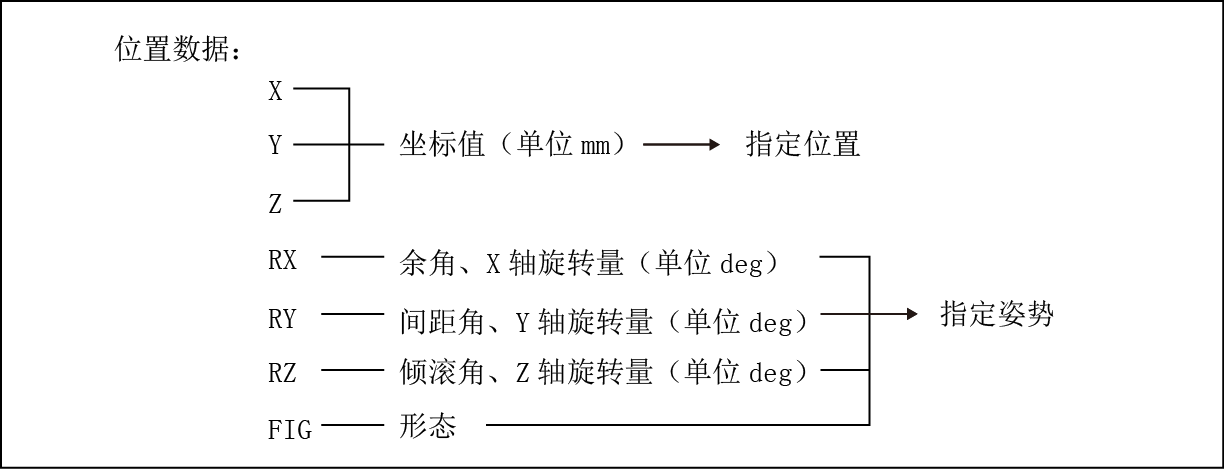
用X、Y、Z表示的坐标值是,用基础坐标系(工件坐标系有效时为工件坐标系)表示机器人的法兰中心(工具定义有效时为工具前端)的位置的值,单位是[mm]。
用RX、RY、RZ表示的偏移角、俯仰角、转动角,是围绕以法兰中心为原点的坐标系(机械界面坐标系)(工具定义有效时为工具坐标系)形成的基准坐标系(工件坐标系有效时为工件坐标系)的各自轴的旋转角度,单位是[deg]。将基准坐标(工件坐标)按RZ、RY、RX的顺序旋转时,要与机械界面坐标系(工具坐标系)的方向一致。如果改变旋转的顺序,则即使是相同的旋转角度也会成为不同的姿势,因此,如上所述,顺序已固定。
用FIG表示的形态是指机器人手臂的关节所采取的形态。关于形态,在“关于臂、肘、手腕的形态”中进行说明。也可选择并指定表示形态的数值,但使用自动选择最佳值的功能可简单指定。有关自动选择的功能,请参照功能指南的“最佳Fig自动选择功能(Auto Fig)”。
5轴机器人只有在法兰正确地与XY平面平行时,才能保持固定的法兰姿势(法兰的三维朝向)。除此之外,法兰姿势可能与位置数据不一致。
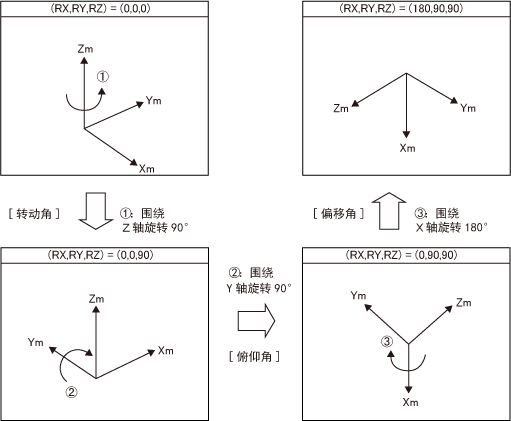
转动角、俯仰角、偏移角的旋转示例
姿势:(RX,RY,RZ)=(0,0,0) → (RX,RY,RZ)=(180,90,90)
ID : 1939