
ID : 1763
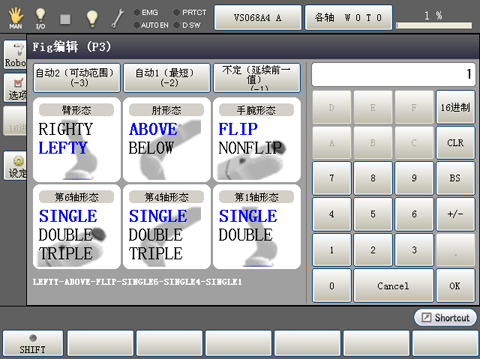
机器人动作形态(Fig)的显示、设定
操作路径:[F3 变量]-[选择T型、P型的Fig要素]-[F5 编辑]
可在T型、P型的各变量中对机器人的动作形态(Fig)进行设定。
Fig的设定方法有如下5种。
- 分别选择设定“臂形态”、“肘形态”、“手腕形态”、“第6轴形态”、“第4轴形态”和“第1轴形态”。
- 使用数字键输入Fig的形态编号进行设定。
- 设定为按压[自动2(可动范围)(-3)]键时,自动选择可执行动作的Fig值。
- 设定为按压[自动1(最短)(-2)]键时,自动选择最短距离的Fig值。
- 设定为按压[不定(沿用前值)(-1)]键时,使用之前移动中使用的Fig值。
| 可使用的键 | |
|---|---|
| [选择形态] |
直接触摸画面,分别对“臂形态”、“肘形态”、“手腕形态”、“第6轴形态”、“第4轴形态”和“第1轴形态”进行设定。 |
| [数字键] |
通过Fig形态编号进行Fig的设定。 可使用数字键输入Fig的形态编号后按压[OK]来进行设定。 |
| [自动2(可动范围)(-3)键] |
自动选择可执行动作的Fig值。 详细内容请参照功能指南的“最佳Fig自动选择功能(Auto Fig)”。 |
| [自动1(最短)(-2)键] |
自动选择最短距离的Fig值。 详细内容请参照功能指南的“最佳Fig自动选择功能(Auto Fig)”。 |
| [不定(沿用前值)(-1)键] |
设定为使用之前移动中使用的Fig值。 详细内容请参照功能指南的“最佳Fig自动选择功能(Auto Fig)”。 |
ID : 1763