
ID : 1701
外部速度的设定
可通过内部速度和外部速度设定机器人的速度。
内部速度是指在程序中通过指令设定的速度。
外部速度是指为了教导及试运行等,通过多功能教导器或小型教导器设定的速度,其单位以相对最高速度(内部速度)的百分比(%)来表示。
速度设定时的注意事项
- 接通电源时的外部速度的初始值为1%。
- 设定了外部速度后,切断控制器的电源或更新设定前外部速度均有效。
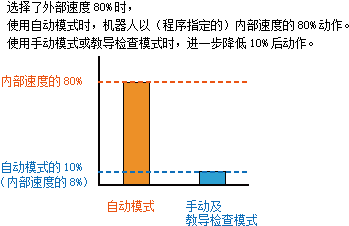
- 在自动模式下,实际的机器人以[内部速度×外部速度(%)]动作。例如,将外部速度设定为80%,则机器人以内部速度×80%的速度运行。
在手动模式、教导检查模式下,以内部速度的10%的速度动作。例如,如果将外部速度设为80%,将以10%×80%,亦即以8%动作。实际的动作速度示例如下图所示。 -
如果设定速度,则加速度、减速度被自动进行计算输入。
加速度(%)= ((速度) /100)2 × 100
减速度(%)= ((速度) /100)2 × 100
(计算示例)假设速度为20%,
加速度(减速度) = (20/100)2 × 100 = 4 %
还可通过多功能教导器或小型教导器修正自动计算出的上述值。此时,最新的修正值生效。 - 外部速度的最小设定允许值是0.1%,与此相对应的外部加速度、外部减速度为0.0001%。当被设定为1%以下的外部速度时,多功能教导器或者小型教导器的状态栏上的栏图表的速度显示为1%。
操作步骤
在机器人运行初期,请将外部速度设定在20%以下。在操作还不熟练时如果进行手动高速运行,则可能有机器人与旋转设备产生误碰撞的危险。
在机器人通过程序动作时也可以设定外部速度、加速度、减速度。但是,该设定变更会即刻生效,机器人突然变更速度。此设定方法很危险,请加以注意。
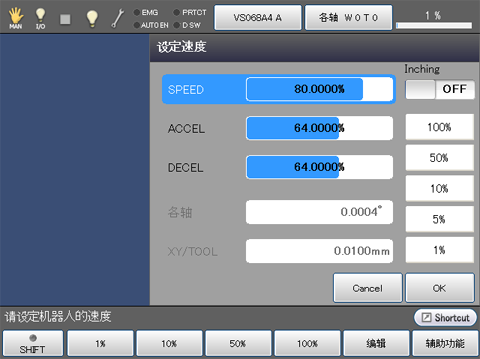
1
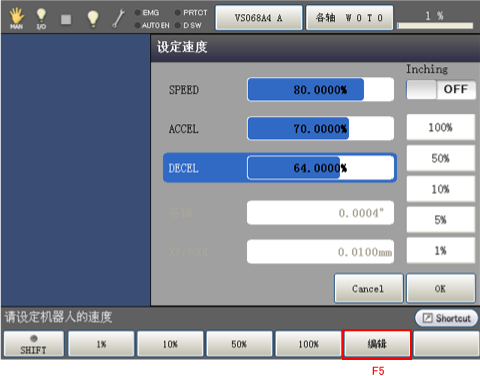
请按压基本画面的SPEED键。STEP2所示的外部速度设定画面会被显示。
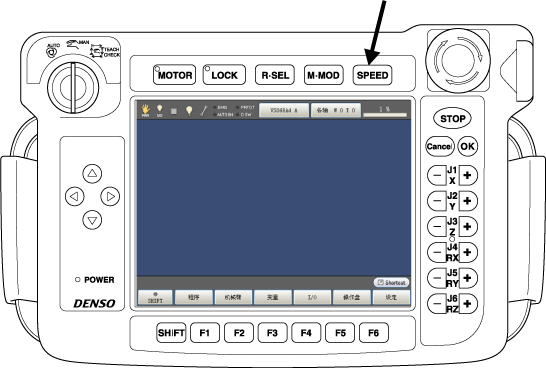
按下画面上的速度栏区域也可显示该画面。
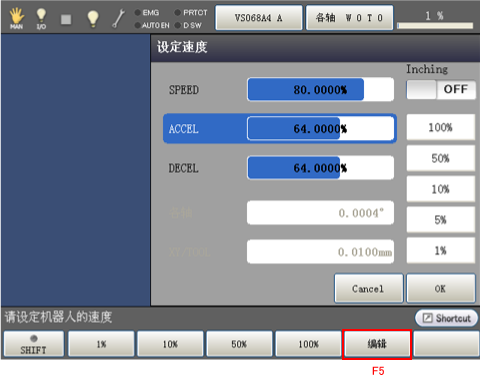
2
确认SPEED行在外部速度设定画面上被选择,然后按压[F5 编辑]。显示STEP3所示的数字键。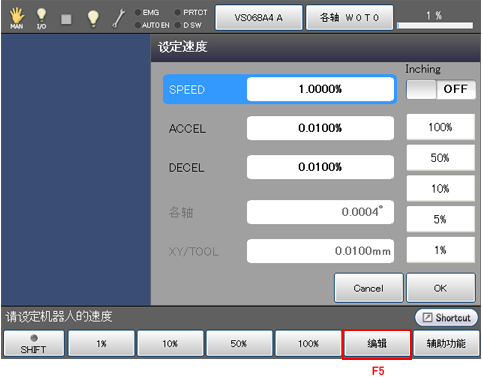
- 代替[F5 编辑],使用F1键~F4键中的某一个键 ,也可以直接输入功能键上所显示的数值。
- 使用左、右方向光标键,以5%为单位,可以增减该数值。此外,如果使用漫步旋钮,则可以以2%为单位进行增减。
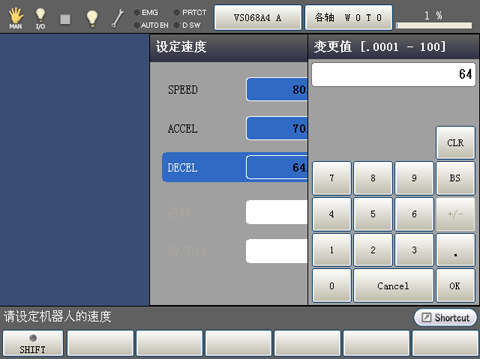
3
请使用画面上显示的数字键上的键,输入任意的数值。要取消输入的数值,请按压[CLR]或者[BS]键。确认输入数值,如果正确,则请按压[OK]键进行确定。
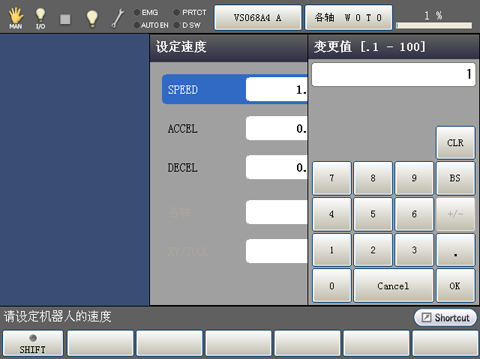
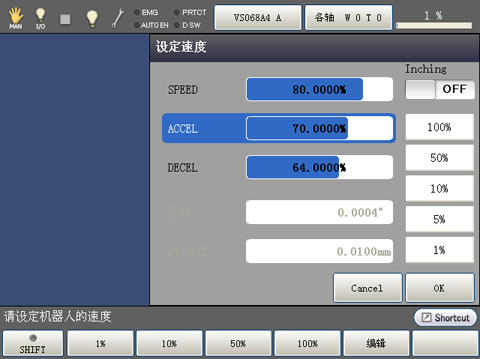
数字键消失,如下所示,外部速度被新输入的数值更新。要取消更新,请按压[Cancel]。画面返回至原画面。
4
请确认外部速度设定画面上所显示的被自动计算出的加速度。
- 1. 该值正确时,请省略以下步骤,移至STEP6。
- 2. 用手动要想变更这些值时,按压下方向光标键,选择ACCEL行,按压[F5 编辑]。显示STEP5所示的数字键。
代替[F5 编辑],使用F1~F4键中的某一个键,也可以直接输入功能键上所显示的数值。参考:使用左、右方向光标键,以5%为单位,可以增减该数值。此外,如果使用漫步旋钮,则可以以2%为单位进行增减。
5
请使用画面上显示的数字键上的键,输入任意的数值。要取消输入的数值,请按压[CLR]或者[BS]键。确认输入数值,如果正确,则请按压[OK]键进行确定。
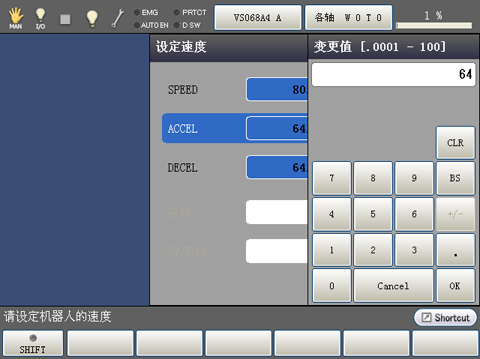
数字键消失,如下所示,加速度被新输入的数值更新。要取消更新,请按压[Cancel]。画面返回至原画面。另外,此处如果按压[Cancel],则之前设定的外部速度也返回至更新前的状态。
6
请确认外部速度设定画面上所显示的被自动计算出的减速度。
- 该值正确时,请按压[OK]按钮进行确定,省略以下的步骤,转移到STEP8。
- 2. 用手动要想变更这些值时,按压下方向光标键,选择ACCEL行,按压[F5 编辑]。显示STEP7所示的数字键。
代替[F5 编辑],使用F1~F4键中的某一个键,也可以直接输入功能键上所显示的数值。
使用左、右方向光标键,以5%为单位,可以增减该数值。此外,如果使用漫步旋钮,则可以以2%为单位进行增减。
7
请使用画面上显示的数字键上的键,输入任意的数值。要取消输入的数值,请按压[CLR]或者[BS]键。确认输入数值,如果正确,则请按压[OK]键进行确定。
数字键消失,如下所示,减速度被新输入的数值更新。如果按压[OK],则该值确定。
如要取消,请按压[Cancel]。画面返回至原画面。另外,此处如果按压[Cancel],则之前设定的外部速度和加速度也返回至更新前的状态。

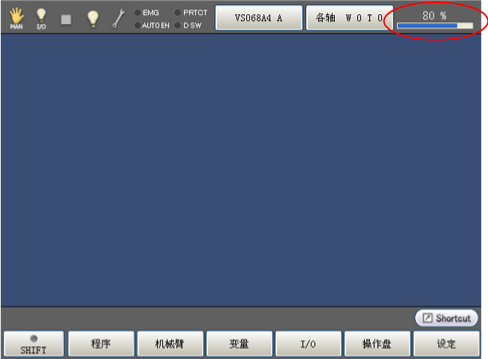
8
多功能教导器的画面返回至基本画面。请确认状态栏右端的速度显示是否为设定后的更新值。
ID : 1701