
ID : 1660
通过程序指令记录
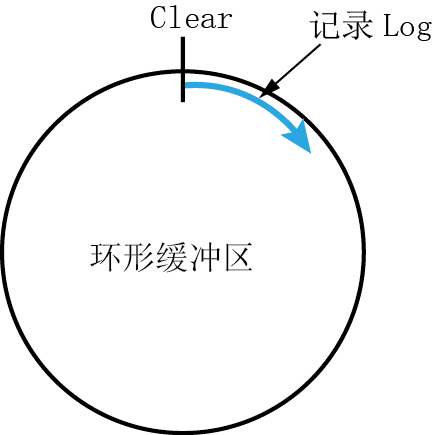
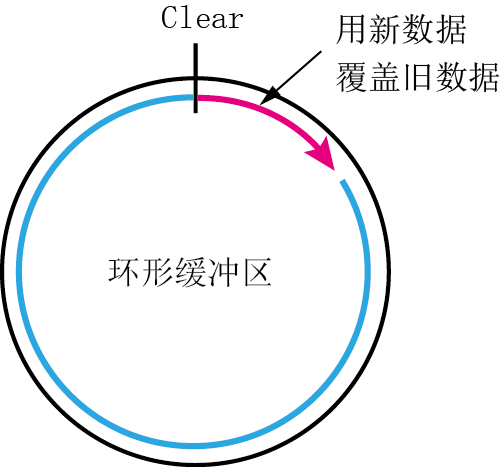
可通过程序指令及多功能教导器、WINCAPSIII操作LOG记录时间的LOG包括有控制LOG、跟踪LOG,伺服LOG。这些log使用称为环形缓冲区的存储器领域来记录log。环形缓冲区拥有一定的容量,写入新数据,覆盖最旧数据并更新。
| 开始记录时 | 超出缓冲区大小时 |
|---|---|
 |
 |
指令的种类
通过以下3个指令可保留程序指定部分的log。
清空log指令
删除保存在环形缓冲区中的数据,开始记录log。
各log的清空log指令如下所示。
| 控制Log | SysLog.Ctrl.Clear |
|---|---|
| 跟踪log | SysLog.Trace.Clear |
| 伺服log | SysLog.Servo.Clear |
开始log指令
指定开始获取log。从该指令的位置开始,开始记录用户可获取的log。
如果事先未执行清空log指令,则在进行清空log后再开始获取log。
各log的开始log指令如下所示。
| 控制Log | SysLog.Ctrl.Start |
|---|---|
| 跟踪log | SysLog.Trace.Start |
| 伺服log | SysLog.Servo.Start |
停止log指令
指定停止记录log。在该指令位置停止向环形缓冲区记录。
各log的停止log指令如下所示。
| 控制Log | SysLog.Ctrl.Stop |
|---|---|
| 跟踪log | SysLog.Trace.Stop |
| 伺服log | SysLog.Servo.Stop |
log数据对象
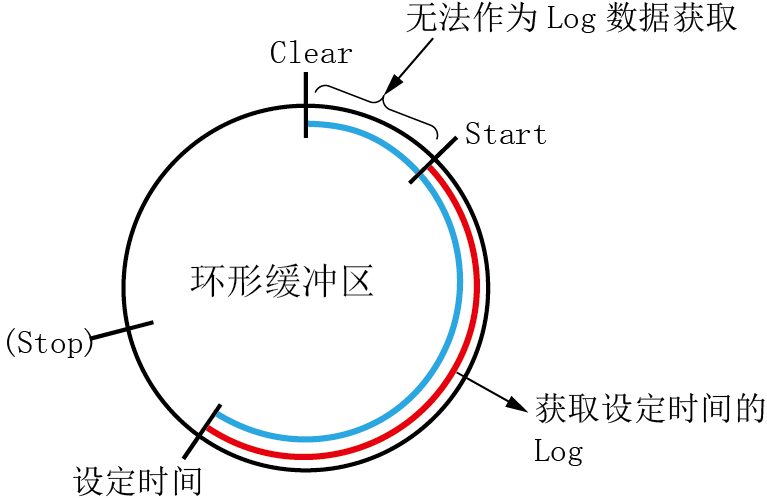
虽然通过清空log开始记录,但用户可从环形缓冲区中获取的log数据为以下几处。
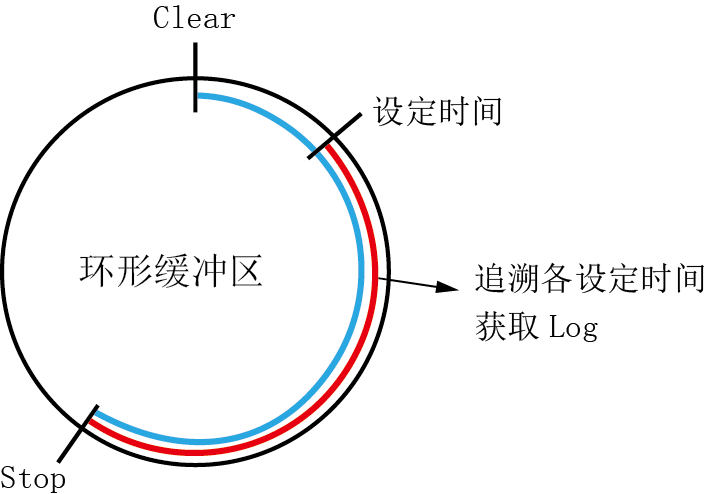
(1)开始log指令到预先通过参数所设定的时间之间的log
(2)开始log指令到停止log指令之间的log
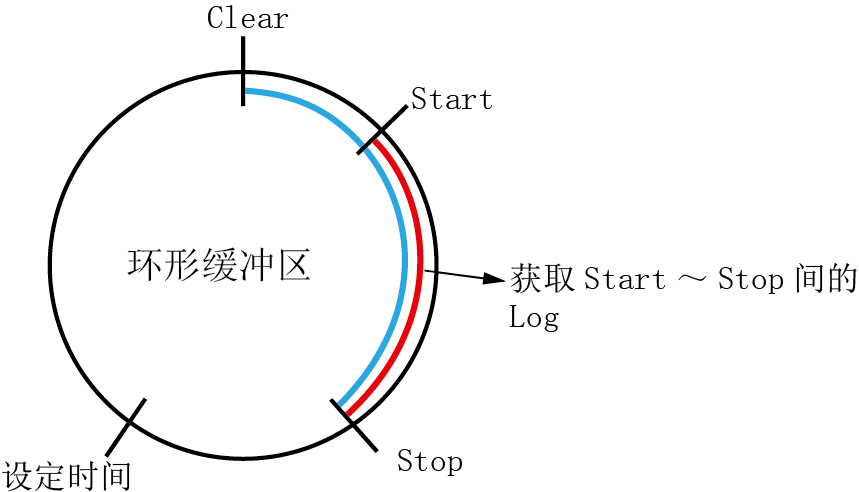
超出设定时间且停止log指令有效时,可获取至设定时间为止的log。
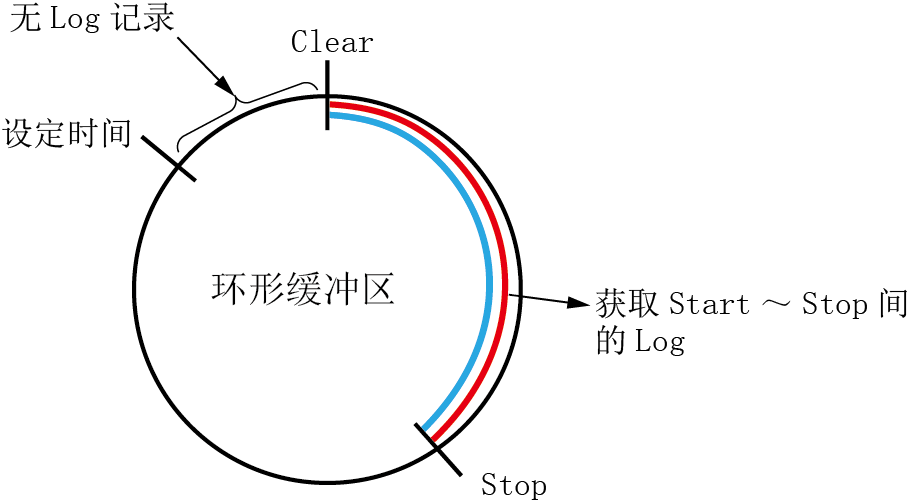
(3)停止log指令到预先通过参数所设定的时间之间的log
但是,通过清空log指令开始记录log的时间短于设定时间时,将获取开始记录log后的数据。
log停止时机
在以下时机停止向环形缓冲区记录log。
- 开始log指令到超过预先通过参数所设定的时间时
- 执行停止log指令时
- 发生错误时
原点复位向导功能的许可证已在机器人控制器上登录时,机器人控制器的软件版本为2.16.*以上时,除了上述条件以外,以下条件也会停止日志的记录。
- 变为紧急停止状态时 (例 : 按下紧急停止按钮时)
- 复位所有程序的全部操作已实施时 (例 : 通过I/O指令复位所有程序)
ID : 1660