
ID : 1612
通过动作重新启动时的轨迹变更
在通过动作中执行停止处理时,通过重新启动可从以下2种选项中选择机器人动作的轨迹。
- 执行向通过动作开始后的目标位置的动作。
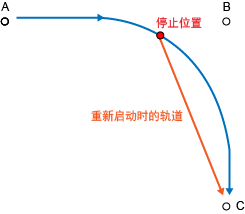
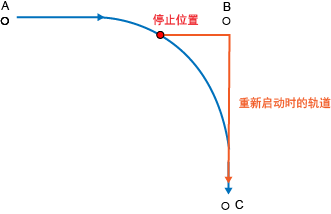
- 向通过起始后的轨道上的结束动作后,执行向通过起始后的目标位置的动作。
轨迹变更方法
通过变更使用条件参数的“再启动时的通过动作继续设定”,变更通过动作再启动时的轨迹。
设定是否经过通过动作开始前的目标位置附近的判定值
即使设定为经过通过动作开始前的目标位置附近,根据通过动作中停止的位置,可设定为移动至通过动作开始后的目标位置。
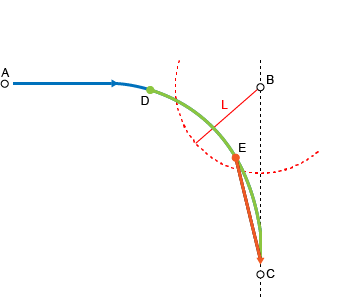
设定项目为从通过动作开始前的目标位置到停止位置间的距离。假设该距离为L。如图所示,使从A到B的直线动作与从B到C的直线动作进行通过动作时,停止位置若为D,则通过再启动执行向B的动作,但停止位置若为E,则不执行向B的动作,而是直接向C动作。
通过变更使用条件参数的“通过动作完成范围”进行L的变更。单位为mm。变更方法与使用条件参数的“再启动时的通过动作继续设定”相同。
注意事项
设定值只是表示大致的范围,并非保证绝对位置。
即使在变更数值的情况下,根据动作速度及插补方法,实际的动作有时并不会发生变化。
使用協调控制时,主局和子局的使用条件参数“再启动时的通过动作继续设定”的值不同、或者已全部设定为1时,在同步动作中继续启动时,可能不会同步动作至目标位置。因此,请将使用条件参数“再启动时的通过动作继续设定”全部设定为0。
ID : 1612