
ID : 1606
通过动作、结束动作、编码器值确认动作的动作示例
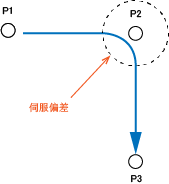
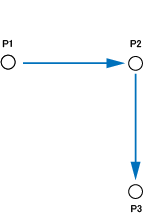
表示4种从当前位置P1起,经过点P2向点P3移动的程序示例。分别为通过动作、结束动作、编码器值确认动作的程序示例。
通过动作的程序示例
Sub ENCODER_MOVE
TakeArm Keep = 1
Move L, @E P[2]
Move L, @0 P[3]
End Sub
结束动作的程序示例
Sub ENCODER_MOVE
TakeArm Keep = 1
Move L, @C P[2]
Move L, @0 P[3]
End Sub编码器值确认动作的程序示例
各轴位置的确认动作
Sub ENCODER_MOVE
TakeArm Keep = 1
Move L, @E P[2]
Move L, @0 P[3]
End Sub前端位置和姿势的确认动作
Sub ENCODER_MOVE
TakeArm Keep = 1
Move L, @C P[2]
Move L, @0 P[3]
End Sub通过动作、结束动作、编码器值确认动作的动作示例
| 通过动作 | 结束动作 | 编码器值确认动作 |
|---|---|---|
 |
 |
 |
ID : 1606