
ID : 1261
MC_ManualReset
进行手动复位。
| 图形显示 | FB范畴 |
|---|---|
|
非动作 |
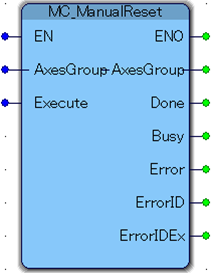
输入输出变量
| 变量名 | 数据型 | 有效范围 | 输入输出条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
输入变量
| 变量名 | 数据型 | 有效范围 |
|---|---|---|
| Execute | BOOL |
|
|
||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | INT |
|
|
| ErrorIDEx | DINT |
|
功能说明
进行手动复位。
可手动复位状态时,进行手动复位。
安全状态时,会发生错误。
既不是可手动复位状态也不是安全状态时,不进行任何操作。
注意事项
执行此FB时,请务必由作业人员同时操作。
例如,确保作业人员按压操作盘的按钮后,该FB执行。
COBOTTA PRO专用的FB。
在COBOTTA PRO用机器人控制器的软件版本为1.9.* 以后时可以使用。
ID : 1261