
ID : 1037
运行准备开始(输入)
功能
- 如果将该输入置于ON(短路),则查出输入条件和动作的输入信号(1)、(2),机器人进行自动启动动作。但是,该信号输入要在专用输出“机器人电源接通结束”置于ON状态下才能进行。
- 如果将“清空机器人异常”置于ON(短路)、将该输入置于ON(短路),则在发生机器人异常时就会解除异常。
输入条件和动作
在输入运行准备开始之前,请将以下的(1)~(3)输入置于ON(短路)。
另外,存在CAL执行(输入)以便进行互换,但RC8系列中没有需要CAL的机器人,因此即使置于ON/OFF,状态也不会发生变化。
(1)接通电机电源(输入)
如果在该信号置于ON(短路)时将运行准备开始置于ON(短路),则就会将电机电源置于ON。但是,如果不是在自动模式下,则不能使用。
(2)SP100(输入)
如果在该信号置于ON(短路)时将运行准备开始置于ON(短路),则就会设定SP100%。
(3)程序复位(输入)
如果在该信号置于ON(短路)时将运行准备开始置于ON(短路),则就会对处于停止状态的所有程序初始化。
如果将(1)~(3)全部置于ON(短路)状态下、将运行准备开始置于ON(短路),则按顺序执行(1)~(3)。
(1)~(3)在多功能教导器、小型教导器上即使执行一部分也是有效的。
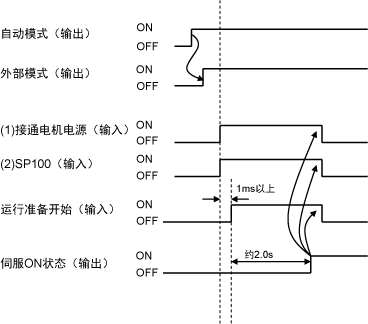
运行准备开始及(1)、(2)的输入时机请参照下图。
运行准备开始和(1)、(2)接收伺服ON时(输出)的ON,置于OFF(关闭)。
启动机器人使其执行所有项目,但运转过程中的暂时停止之后复位时,为了缩短复位时间仅执行所需要的项目。
状态图
 |
ID : 1037