
ID : 2714
バーチャルフェンス近傍判定機能
スレーブロボットでバーチャルフェンスを設定していた場合に、スレーブロボットがバーチャルフェンスに接近した際、操作しているCOBOTTA側で反力を発揮する機能です。
設定方法
COBOTTA側の設定
1
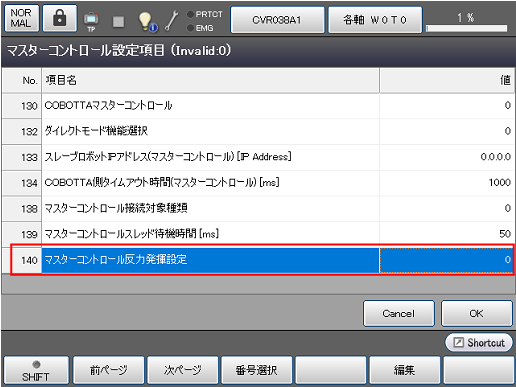
操作経路: [F6 設定] - [F10 COBOTTA] - [F8 マスター設定]
マスターコントロール設定項目画面でNo.140[マスターコントロール反力発揮設定]を選択し、[F5 編集]を押します。
2
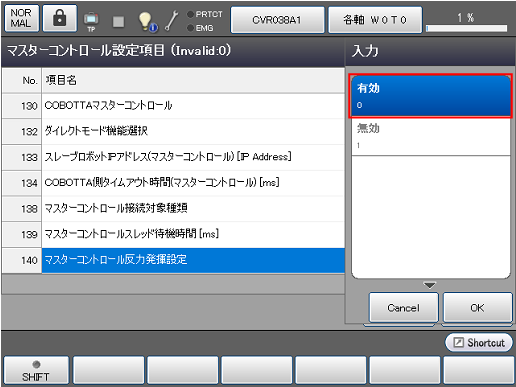
[0 : 有効]を選択し、[OK]ボタンを押します。
3
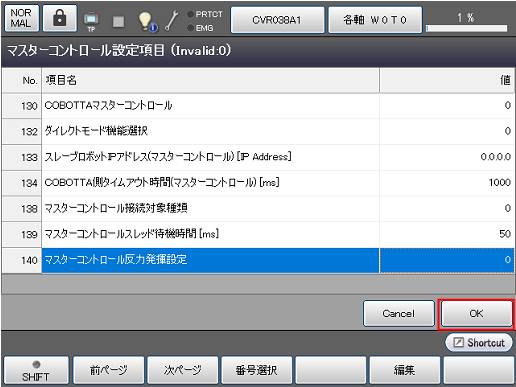
[OK]ボタンを押します。
スレーブロボット側の設定
バーチャルフェンスの設定は完了しているもとのして考えます。
バーチャルフェンスの設定は、"バーチャルフェンス機能"を参照してください。
1
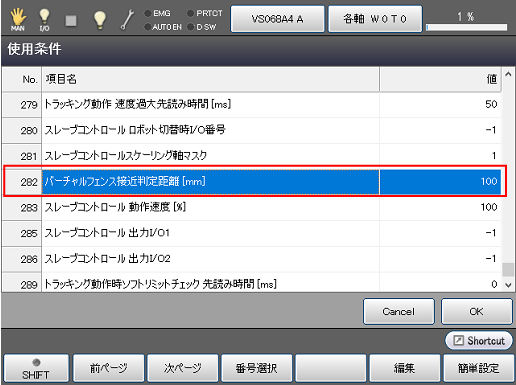
操作経路: [F2 アーム] - [F6 補助機能] - [F1 使用条件]
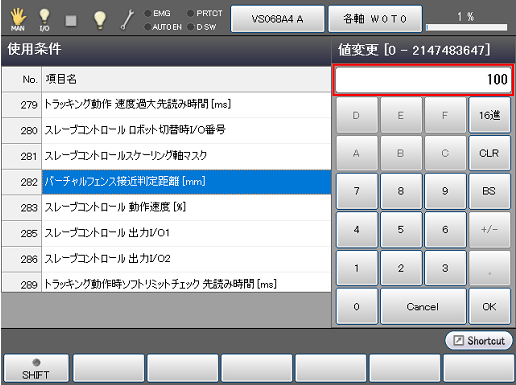
使用条件画面でNo.282[バーチャルフェンス接近判定距離]を選択し、[F5 編集]をクリックします。
2
バーチャルフェンスにどれだけ接近したら反力を発揮するかの値を設定します。
設定完了後、[OK]ボタンを押します。
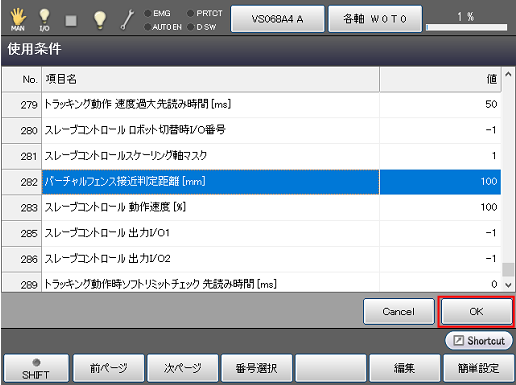
3
[OK]ボタンを押します。
ID : 2714