
ID : 1180
力センサ有ロバストコンプライアンス機能の調整手順
力センサ有ロバストコンプライアンス機能の調整は「接触対象の硬さレベル」パラメータの値を変更し行います。
- 「接触対象の硬さレベル」パラメータはティーチングペンダントとWINCAPSIIIから変更することができます。併用すると、混乱により誤った設定を行う恐れがありますので、どちらかに統一して実施することをお勧めします。
- 「接触対象の硬さレベル」以外のパラメータは、ティーチングペンダントでもコマンドでも変更できます。併用すると、混乱により誤った設定を行う恐れがありますので、どちらかに統一して実施することをお勧めします。
- 制御したい方向と、Move命令などでのロボット動作命令の動作方向が一致している場合は、指定した力通りに制御はできませんので、制御を開始したい位置まで移動したら、MotionSkipでロボット動作命令をスキップさせてください。
パラメータ調整方法
振幅と収束時間が理想的になる「接触対象の硬さレベル」を、現物にて調整します。
実際に行う作業を動作させ、振動と収束時間が理想的な状態になるようにパラメータ調整を行います。
以下の表の2項目が満足するように調整を行ってください。
振幅や収束時間については力制御ログを利用し確認する事が可能です。
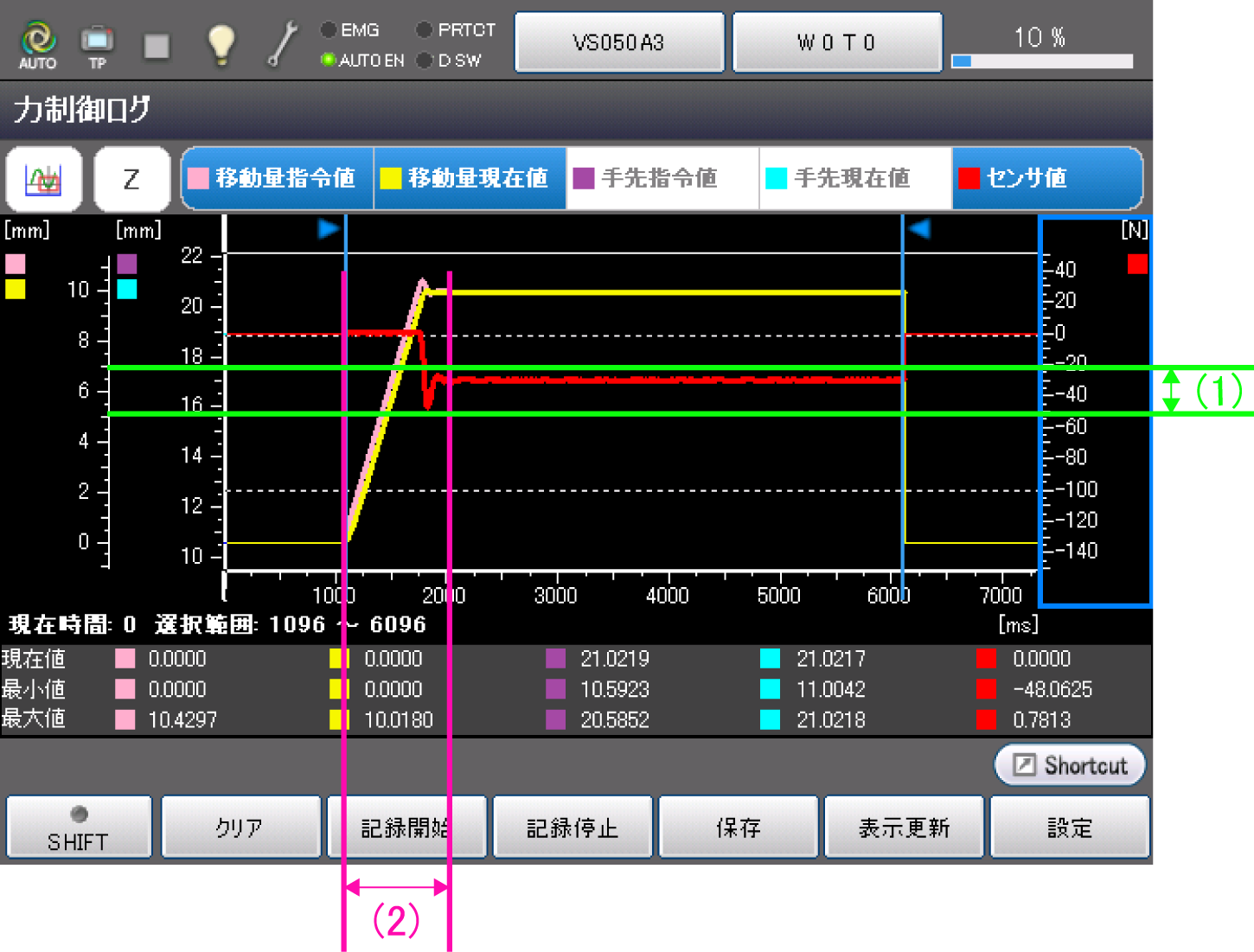
| 番号 | 確認項目 |
|---|---|
| (1) | 振幅が希望した目標値±許容値通りになっているか |
| (2) | 希望した時間以内に収束しているか |
力制御ログについては、「力制御ログの取得・表示・保存」を参照してください。
対象の硬さレベルと振幅、収束時間の関係
「接触対象の硬さレベル」を操作すると、目標制御力への応答性は下表のように変化します。
| 接触対象の硬さレベル | 収束時間 |
振幅 |
|---|---|---|
| 大きくする | 長い | 小さい |
| 小さくする | 短い | 大きい |
調整時の注意
振動するような「接触対象の硬さレベル」を設定した場合は、力制御ができていません。
振動した際に設定していた「接触対象の硬さレベル」以下のレベルは設定しないでください。
硬さレベルを下げすぎた場合、不安定になり振動することがあります。
ID : 1180