
ID : 1179
力センサ有ロバストコンプライアンス機能のパラメータ設定
パラメータ設定詳細を以下に示します。
- 力制御番号(コンプライアンス機能のパラメータテーブル番号)毎に、パラメータを設定します。制御モードの指定も力制御番号毎に行います。
- 力制御の設定は、「力制御設定」画面と、「力制御詳細設定」画面、「センサ設定」画面の三つに分かれています。
- 項目名欄の[ ]内に記述されているのは、ForceParamの項目名です。
- 大きな制御力を指定すると、ロボットは高速に動作します。高速動作中にワークと衝突すると、力センサやロボットが過大な力を受け、故障や破壊につながります。調整時には安全のため、制御割合は小さな値から徐々に大きくしていき、力制御をしたくない方向は0%にしてください。
力制御番号を切りかえる際は意図しない動作を防ぐため、切りかえ後の力制御番号に設定されているパラメータが意図した設定になっていることを確認して下さい。
力制御設定
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F6 設定]
力制御番号(コンプライアンス機能のパラメータテーブル番号)1~10を指定し、[OK]ボタンを押します。
| 項目名 | 単位 | 範囲 | 詳細 |
|---|---|---|---|
| 制御モード | - | 0、1、3 | 以下の制御モードより"3"を選択します。 0:コンプライアンス機能 1:力センサ有コンプライアンス機能 3:力センサ有ロバストコンプライアンス機能 |
| 力制限座標系選択 [座標系] |
- | 0、1、2 | 座標を以下より選択します。 0:ベース座標系 1:ツール座標系 2:ワーク座標系 |
| 目標制御力 [力] (X、Y、Z、RX、RY、RZ) |
N | -5000~5000 | ロボットを制御するための力で、設定した力以上は出力しません。 この値を小さくすると、小さな外力に倣って動作するようになります。 0を指定すると、常に外力にならって動作するようになります。 |
| Nm | -1000~1000 |
力制御詳細設定
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F12 詳細設定]
力制御番号(コンプライアンス機能のパラメータテーブル番号)1~10を指定し、[OK]ボタンを押します。
| 項目名 | 単位 | 範囲 | 詳細 |
|---|---|---|---|
| 偏差許容値 [PosEralw=位置偏差値] (X、Y、Z、RX、RY、RZ) |
mm | 0~1000 | 手先位置の偏差許容値を設定します。 力センサ有ロバストコンプライアンス機能の場合は、力制御開始からの手先位置の移動量を監視しています。 |
| deg | 0~360 | ||
| 軸偏差許容値 [Eralw=各軸偏差許容] (J1~J8) |
deg | 0~1000 | 各軸の偏差許容値を設定します。 力センサ有ロバストコンプライアンス機能の場合は、力制御開始からの各軸の移動量を監視しています。 ただし、付加軸は設定しても無効です。 |
| 制御割合 [Rate=制御割合] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | 力センサ有ロバストコンプライアンス機能利用時にどれくらいの割合で制御するか決めます。 通常、力制御したい方向は制御割合を100%にしてください。力制御したくない方向は制御割合を0%にしてください。 |
| 最大並進速度 [SpMax=最大並進速度] |
mm/s | 0~10000 | 接触前までの最大速度を決定します。 |
| 最大回転速度 [RSpMax=最大回転速度] |
deg/s | 0~10000 | 接触前までの最大回転速度を決定します。 |
| 接触対象の硬さレベル(X、Y、Z) | 0~3 | 接触対象物に対し、選択した座標系の各軸(X,Y,Z)方向に力を加えたときの、接触対象物の硬さレベルを設定します。 0: 硬さレベル0 1: 硬さレベル1 2: 硬さレベル2 3: 硬さレベル3 硬さレベルが大きくなるほど硬い対象物に対応することができます。 調整を行う際は、初期値の"3"から始めます。 |
|
| 接触対象の硬さレベル(Rx、Ry、Rz) | 0~1 | 接触対象物に対し、選択した座標系の各軸周り(Rx,Ry,Rz)の方向に力を加えたときの、接触対象物の硬さレベルを設定します。 0: 硬さレベル0 1: 硬さレベル1 硬さレベルが大きくなるほど硬い対象物に対応することができます。 調整を行う際は、初期値の"1"から始めます。 |
メンテナでのみ設定可能なパラメータ
メンテナの場合は、上表の項目に追加して、下表の項目の設定もできます。
| 項目名 | 単位 | 範囲 | 詳細 |
|---|---|---|---|
| 特殊制御モード | - | 0、8 | 力センサ有ロバストコンプライアンス機能では使用しません。 |
WINCAPSIIIでのみ設定可能なパラメータ
下表の項目は、WINCAPSIIIでのみ設定ができます。
| 項目名 | 単位 | 範囲 | 詳細 |
|---|---|---|---|
| 位相進め時間 (X、Y、Z、RX、RY、RZ) |
sec | 0~ |
力センサ有ロバストコンプライアンス機能では使用しません。 |
センサ設定
操作経路:基本画面 - [F2 アーム] - [F2 力制御] - [F5 センサ] - [F1 センサ設定]
力センサの出力値が接触判定力、接触判定モーメントの設定値を越えると目標制御力に応じた力制御を開始します。ここでは、力制御が開始される状態を対象物へ接触している状態とします。
| 項目名 | 単位 | 範囲 | 詳細 |
|---|---|---|---|
| ロバストコンプライアンス接触判定力 | N | 0~ | 力センサからの値の絶対値が設定値を越えると、目標制御力に応じた力制御を開始します。 設定する値は、目標制御力よりも小さい値に設定してください。 |
| ロバストコンプライアンス接触判定モーメント | Nm | 0~ | 力センサからの値の絶対値が設定値を越えると、目標制御力に応じた力制御を開始します。 設定する値は、目標制御力よりも小さい値に設定してください。 |
- 目標制御力を0に設定した方向は、常にならい動作を行います。そのため「センサ設定」画面で設定するパラメータの値に関わらず、常に力制御状態で動作します。
- 接触判定力、接触判定モーメントの設定値は、力センサのノイズ以上の値を設定してください。ノイズの値より小さい値を設定した場合、正しく接触対象物との接触が判定されません。
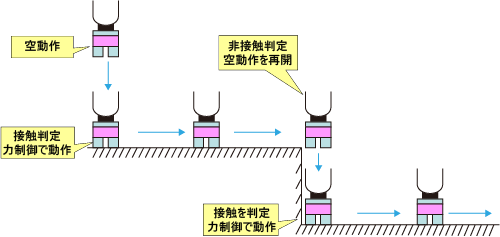
対象物との接触について
力センサ有ロバストコンプライアンス機能を有効にすると、センサの出力値から物体への接触を判定されるまで空動作を行います。
空動作時の速度は、設定した"最大並進速度"または"最大回転速度"の設定値と"制御割合"を元に以下の式で決まります。
- 空動作速度 = (最大併進速度または、最大回転速度) × 制御割合
ロボットの動作速度を変更したい場合は、"最大並進速度"または"最大回転速度"、"制御割合"のパラメータを変更してください。これらのパラメータは、上記の"力制御詳細設定"の中にあります。
ID : 1179