
ID : 6961
监视的设定
操作路径:基本画面 - [F2 机械臂] - [F6 辅助功能] - [F2 碰撞/干涉]
按[F2 虚拟栅栏],打开画面。
进行监视的设定。如果按[F7设定],显示各参数,因此将“366:虚拟栅栏设定”设为有效,若有必要变更其他参数的默认值。其他值的变更请按[F5编辑]。
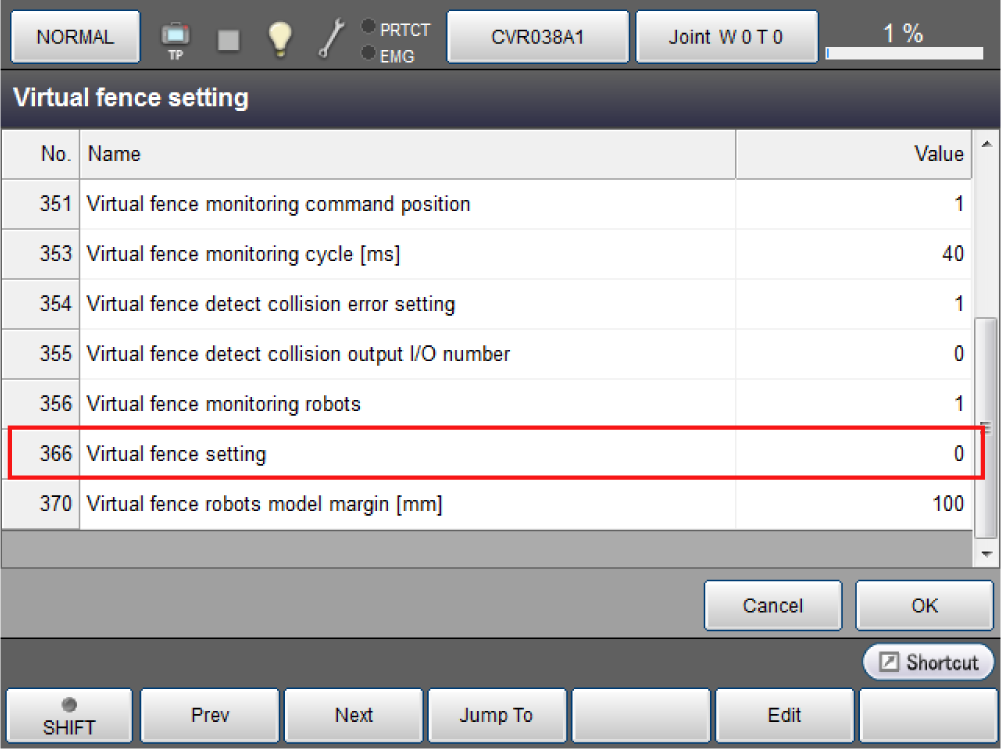
参数一览
机器人的停止处理通过错误发生实现,因此如果不将“354:虚拟栅栏碰撞检出时的错误设定”设为有效,即使检出碰撞机器人也不停止。
| 编号 | 项目名 | 单位 | 初期设定 | 内容 |
|---|---|---|---|---|
| 346 | 虚拟栅栏机器人监视 | - | 1 | 进行机器人与设备的监视。 0:无效 1:有效 |
| 347 | 虚拟栅栏工具监视 | - | 1 | 进行工具与设备的监视。 0:无效 1:有效 |
| 348 | 虚拟栅栏机器人-工具监视 | - | 1 | 进行机器人与工具的监视。 0:无效 1:有效 |
| 349 | 虚拟栅栏当前值监视 | - | 0 | 进行当前值的监视。 0:无效 1:有效 |
| 350 | 虚拟栅栏目标位置监视 | - | 0 | 进行目标位置的监视。 如果设为有效,判断动作开始时是否碰撞。 |
| 351 | 虚拟栅栏指令位置监视 | - | 1 | 进行指令位置的监视。 如果设为有效,判断动作中是否碰撞。 |
| 353 | 虚拟栅栏监视周期 | ms | 8 | 设定监视周期。 |
| 354 | 虚拟栅栏碰撞检出时错误设定 | - | 1 | 可设定检出碰撞时是否输出错误。 0:无效 1:有效 |
| 355 | 虚拟栅栏碰撞检出时输出I/O编号 | - | 0 | 设定输出的I/O编号。(仅在检出当前值时有效) |
| 356 | 虚拟栅栏机器人间监视 | - | 1 | COBOTTA中不使用。 |
| 366 | 虚拟栅栏设定 | - | 0 | 进行虚拟栅栏功能的设定。 重新启动后,设定有效。 |
| 370 | 虚拟栅栏机器人间监视模型扩展尺寸 | mm | 100 | COBOTTA中不使用。 |
发生监视周期超时时,首先请减少监视模型。如果没有效果,请将参数“353:虚拟栅栏监视周期”延长为8ms以上。
ID : 6961