
ID : 7147
作業上の注意
- COBOTTAは16歳以上を対象としています。
- COBOTTA使用中にCOBOTTAと接触する可能性のある人体の部位は、上半身(指、手、腕、胸、肩、背中、腹、腰)です。
ここで"作業"とは、特に指定がない場合は、ロボットの搬送、設置、ロボット設備の組立(電気配線、ツール・ハンド組付け、エア配管)、調整、異常処置、保守点検、清掃などの作業すべてを含みます。
また、作業者は "使用者の分類" に記載されている種類に分けられます。各使用者は、"使用者の分類" に記載されている教育 (トレーニング) を受講してください。
防護具の着用
- 作業者は、リスクアセスメントに従いヘルメット、安全靴、安全めがね等の防護具を着用してください。
- グリスを扱う場合は、皮膚や目につかないよう、手袋や安全めがね等の防護具を着用してください。
作業中の注意
- 作業時にロボットの下部に体を入れないでください。アプリケーションのリスクアセスメントで体への接触が想定される場合は、防護具の着用や遮蔽板の設置等の保護対策を講じてください。
- ロボットの制限空間内に頭部を入れないでください。
- 破損の恐れがあるため、強い力をロボットに加えないでください。また、乗ったりぶら下がったりしないでください。
-
髪や衣服が巻き込まれないようにしてください。
- ブレーキを解除すると、自重で動くことがあります。ロボットを支えた状態でブレーキ解除をしてください。
- 制限空間内で作業を行う場合、非常時にただちにロボットを停止できるように、作業者の近くに非常停止スイッチを設置してください。
- ロボットは使用中熱くなります。環境温度が高い時に触れると火傷をする恐れがあります。ダイレクトティーチング等で長時間触れる場合は、電源を切って冷却されるまでお待ちください。
「作業規定」の作成と作業者への徹底
以下の事項について「作業規定」を定め、作業者に徹底を図ってください。
- 起動方法・スイッチの取扱方法等の作業において必要となるロボットの操作の手順
- ティーチングなどの作業を行なう場合のロボットの速度
- 複数の作業者に作業を行なわせる場合の合図の方法
- 異常時に作業者がとるべき異常の内容に応じた措置
- 非常停止装置等が作動しロボットの運転が停止したあと、これを再起動させるために必要な異常事態の解除の確認・安全の確認等の措置。
- 上記以外に、ロボットの不意の作動による危険または、ロボットの誤操作による危険を防止するために必要な次に掲げる措置
- 操作盤への表示
- 制限空間内で作業を行なう作業者の安全確保
- 作業位置・姿勢の徹底 ロボットの動きが常時確認でき、かつ異常時にすぐ退避できる位置および姿勢
- ノイズ防止対策の実施
- 関連機器の操作者との合図の方法
- 異常の種類および判別方法
「作業規定」はロボットの種類・設置場所・作業内容に応じた適切なものとしてください。
「作業規定」の作成にあたっては、関係作業者・設備メーカの技術者・労働安全コンサルタント等の意見を取り入れるように努めてください。
操作盤への表示
作業中は、当作業に従事している作業者以外の者が起動スイッチ・切り替えスイッチ等を不用意に操作することを防止するため、タブレットや操作盤等に、作業中である旨のわかりやすい表示をしてください。場合によっては、操作盤のカバーに施錠する等の措置を講じてください。
ハンドの安全な取り付けと使用方法
- ハンド・ツール(エンドエフェクタ)の取り付け、使用の際には電源OFFやエアー、電源の変化によって危険が発生しないようにしてください。また、装置内部に残留しているエネルギーも考慮してください。
- オプションのハンドのフィンガをお客様にて準備される場合、リスクアセスメントを実施のうえ、鋭利な箇所が無い形状等の保護方策を講じてください。また、お客様にてハンド全体を準備される場合、同様にリスクアセスメントを実施のうえ、140N以上の力が出ない、鋭利な箇所が無い形状等の保護方策を講じてください。
- ハンドおよびワークは、ツール(手先に取付ける機器)を満足するように設計、製作、取付してください。満足しない場合、人への傷害、ロボットの破損の恐れがあります。また、保証の対象外となります。
- 電動バキュームは、連続運転を行うと高温になる恐れがあります。真空パッドの交換などで電動バキュームに触れる際は、十分冷ましてから作業してください。
- 電動バキュームの吸気口は、覗き込まないでください。送風動作などにより、電動バキュームのフィルタに溜まったゴミなどが噴き出す恐れがあります。
カメラについて
お客様にてアームに取り付けるカメラを準備する場合、リスクアセスメントを実施のうえ、鋭利な箇所が無い形状等の保護方策を講じてください。また、オプションのAFカメラ(N10-W02)のキャリブレーションデータは使用できませんので、お客様にて必ずキャリブレーションを実施してください。
速度制限値等のパラメータの設定
- 速度制限値等のパラメータは、リスクアセスメントを実施のうえ決定してください。
- COBOTTAパラメータツールにて、パラメータがすべて正しく設定されていることを確認のうえ、ロボットへ送信してください。パラメータの設定方法は、"COBOTTAパラメータツール ユーザーズガイド(PDF:3,434KB) を参照してください。
ヘルプメニューの[ユーザーズガイド]を選択すると開くことができます。
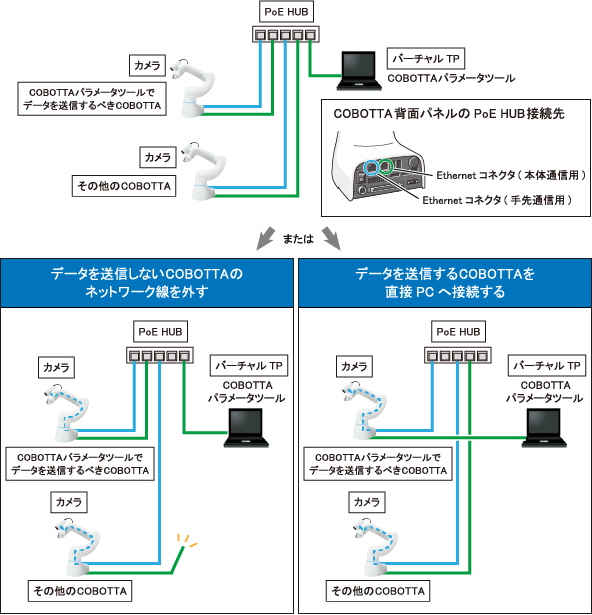
なお、COBOTTAパラメータツールのデータをCOBOTTAに送信する場合、COBOTTAパラメータツールとデータを送信するべきCOBOTTAが一対一となるように接続してください。
例えば下図のように、PoE HUBを使用して2台のCOBOTTAがつながっている場合は、以下のどちらかの方法で接続し直します。
- データを送信しないCOBOTTAのネットワーク線を外す
- データを送信するCOBOTTAを直接PCへ接続する
その状態でCOBOTTAパラメータツールのデータを送信した後、接続を元に戻してください。
- パラメータ送信後、意図した動作になっていることを確認してください。
-
パラメータ変更による事故を防止するため、パスワードは厳重に管理してください。
作業開始前の点検
作業を開始する前に次の事項を点検し、異常を認めたときは、ただちに補修その他必要な措置を講じてください。
- 外部電線の被覆または外装の損傷の有無、誤配線の有無
- ロボットの作動の異状の有無(作動時に異常な音、振動がないか)
- 非常停止装置の機能
- 配管からの空気または油漏れの有無
- ロボットの制限空間内またはその付近の障害物の有無
- 作業従事者は非常停止スイッチをすぐ押せるように、作業従事者の近くに非常停止を設置していること
- 作業従事者以外の者が制限空間内にいないこと
- ロボットが落下や転倒しないように、固定されていること
電源投入前の点検
故障や感電などの恐れがあるため、COBOTTAの電源を入れる前に、配線やケーブルの損傷状態を確認してください。
残圧の開放
空気系統部分の分解・部品交換等の作業を行なうときは、あらかじめ駆動用シリンダ内の残圧を開放してください。
設置後および部品交換後の初期テスト
設置後、部品交換後、およびソフトウェアをバージョンアップした後は、初期テストを行ってください。
初期テストは下記の項目を実施してください。
- 1年点検と同じ点検を実施します。
-
安全関連の機能が正しく動作することを確認します。
(例 : ロボットを低速で動作させている最中に非常停止ボックスの押しボタンスイッチを押し、ロボットが停止することを確認する。)
- 各軸が手動動作で正しく動作することを確認します。
上記の項目がすべて問題なければ合格です。
確認運転時の注意
確認運転を行なう場合は、作業者はできる限り制限空間の外に出て、行なってください。
また、防護手段が有効であるか、初期テストと定期的な検査を実施してください。防護手段としては、非常停止スイッチ、防護停止信号、機械的なストッパ(メカストッパ)、安全機能(SLS、SLT、SAL)などがあります。
診断動作時の注意
診断動作中は、意図しない動作をする恐れがあります。ロボットの可動範囲内に入らないようにしてください。
CALSET時の注意
自動でCALSET位置へ動作させている間は、意図しない動作をする恐れがあります。ロボットの可動範囲内に入らないようにしてください。
梱包姿勢動作時の注意
梱包姿勢動作中は、意図しない動作をする恐れがあります。ロボットの可動範囲内に入らないようにしてください。
プログラム起動時の注意
-
起動時の措置
プログラム起動の前に,全ての安全防護機能が機能していることを確認してください。あらかじめ次の事項を確認するとともに一定の合図を定め、関係作業者に対し合図を行なってください。
- 工具等が所定の位置にあること。
- ロボットまたは関連機器の異常を示すランプ等による異常表示がされていないこと。
- ロボットの周りに人がいないこと。
- 異常発生時の措置
ロボットまたは関連機器に異常が発生し応急処置のためロボットに近づくときは、非常停止装置を作動させる等によりロボットの運転を停止させ、起動スイッチに作業中である旨の表示をする等、作業者以外の者がロボットを操作することを防止するための措置を講じてください。
作業時の電源遮断
- 安全のため、設置、組立(電気配線、ハンド・ツール組付け、エア配管)、日常点検、保守点検、修理、部品交換などの作業を行う時は、電源を切って行ってください。
- COBOTTAの電源スイッチは、二次側遮断用です。電源スイッチを切っても内部には充電部が残っています。作業をする場合は、電源コネクタを抜くか、設備のブレーカを切って確実にCOBOTTAへの電力を遮断して下さい。
- さらに、他の作業者が不用意に電源を入れることができないよう、コンセントを抜くなどの処置を行ってください。
- 電源タップの通電スイッチを遮断器として使用しないでください。
清掃時の注意
ロボットやケーブル類の清掃を行なう際には、設備の電源ブレーカを切るか、または電源コネクタを抜いてください。
タブレットの安全な保管
誤操作を防止するため使用していないタブレットは管理された場所に保管してください。
修理時の注意
- 定められた範囲以外の修理は行なわないでください。
- いかなる場合においても、インターロック機構を取りはずさないでください。
- ロボットのカバーを開くときは、必ずロボットの電源スイッチを切って、電源コネクタを抜いてください。
- 補修用の部品は必ず当社指定のものをご使用ください。
非常時及び異常事態の対応
非常時及び異常事態が発生した場合に、要員がとるべき対応を決め、定期的に訓練をしておいてください。
万が一COBOTTAに体の一部を捕捉された場合、
- タブレットからブレーキを解除して脱出してください。ブレーキの解除方法はブレーキの設定を参照してください。
- ブレーキを解除できない場合、アームを掴みブレーキを引きずって動かすことにより脱出してください。
軸を押す時には力を入れ過ぎて怪我をしないよう気をつけてください。特にブレーキなしの軸には注意してください。
下表に、各軸を90°動かした場合のブレーキ寿命を示します。
| ブレーキ寿命[回] | |
|---|---|
| 1軸 | 350 |
| 2軸 | 100 |
| 3軸 | 200 |
| 4軸 | 950 |
| 5軸 | 1,000 |
| 6軸 | - |
6軸には、ブレーキは付いていません。
メカストッパについて
メカストッパにロボットが衝突した場合は、ロボットが損傷している可能性があります。ご使用の前に下記の内容をご確認ください。
確認した結果、位置がずれている等、意図しない動作をした場合は、弊社サービスにご連絡ください。
-
メカストッパでの位置を確認
まず、COBOTTAのブレーキを解除し、各軸をメカストッパに当たるまでゆっくりと動作させてください。その際、メカストッパに過度な力が加わらないように注意してください。ブレーキの解除方法はブレーキの設定を参照してください。
その後、メカストッパでの現在角度の値が下記の基準値と5度以上の差がないことを確認してください。
<メカエンド基準値>
+側 -側 1軸 +152.5 -152.5 2軸 +102.9 -62.9 3軸 +142.1 -15.9 4軸 +172 -172 5軸 +141.2 -101.2 6軸 +173.5 -173.5 -
教示済みのポイントの確認
教示済みのポイントに移動させ、ツール先端と教示ポイントがずれていないことを確認してください。
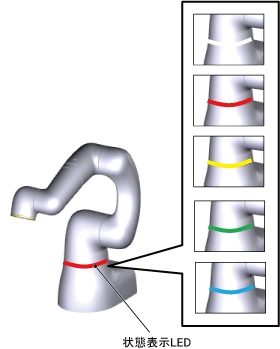
状態表示LEDについて
COBOTTA本体には、COBOTTA自身の状態を示すLEDを備えています。LEDの点滅には、速い点滅と遅い点滅の2種類あります。COBOTTA起動中は、指定された色で点灯または点滅します。
速い点滅は、360msecの周期で点灯と消灯を繰り返します。
遅い点滅は、1,440msecの周期で点灯と消灯を繰り返します。
LEDの表示の仕方に対するCOBOTTAの状態については、後述の"LEDの表示の仕方とCOBOTTAの状態"を参照してください。
- LEDが発色しない場合や部分的に色が指定された状態とは異なる場合は、LEDの故障が考えられます。ただちに使用を中止し、弊社サービスまでご連絡ください。
- LEDはCOBOTTAの状態をお客様が確認するうえで重要なため、日常点検の際にLEDの発光状態をご確認ください。確認方法は"状態表示LEDの確認方法"を参照してください。
状態表示LEDは上記でも説明していますが、COBOTTA自身の状態を示すLEDです。システム全体の状態を示すLEDではありません。例えば、何らかの理由により非常停止ボックスのスイッチを押したとしても、COBOTTA自身の状態に変化がなければ、状態表示LEDは変化しません。
LEDの表示の仕方とCOBOTTAの状態
| 状態 | ロボット | LED | 対応・備考 | ||
|---|---|---|---|---|---|
| 初期化 | 電源ON | 濃い緑 | 遅い点滅 | - | |
| 通常 | ダイレクトティーチング | ダイレクトティーチング中 | 青 | 点灯 | - |
| ソフトリミット近傍 | 黄 | 遅い点滅 | - | ||
| ソフトリミットを超えた | 黄 | 速い点滅 | ソフトリミットの範囲内に戻してください。 | ||
| 特異点近傍 | 黄 | 遅い点滅 | - | ||
| ダイレクト準備モード | 青 | 遅い点滅 | - | ||
| プログラム稼働中 | スロースタート(SS)動作中 | 白 | 速い点滅 | - | |
| プログラム再生 | 白 | 点灯 | - | ||
| AutoCAL | AutoCAL実行中 | 白 | 点灯 | - | |
| 診断動作 | 診断動作実行中 | 白 | 点灯 | - | |
| 手動動作 | 手動動作中 (変数移動中) |
白 | 点灯 | - | |
| その他 | 操作デバイスからの接続応答 | 緑 | 速い点滅 | 起動権の設定が"TP"以外の場合は、緑の点灯となります。 | |
| 操作デバイス接続待ち | 緑 | 遅い点滅 | |||
| 操作デバイス接続中 | 緑 | 点灯 | - | ||
| 異常 | 黄 or 赤 | 点灯 | エラーコード表に従い処置してください。 | ||
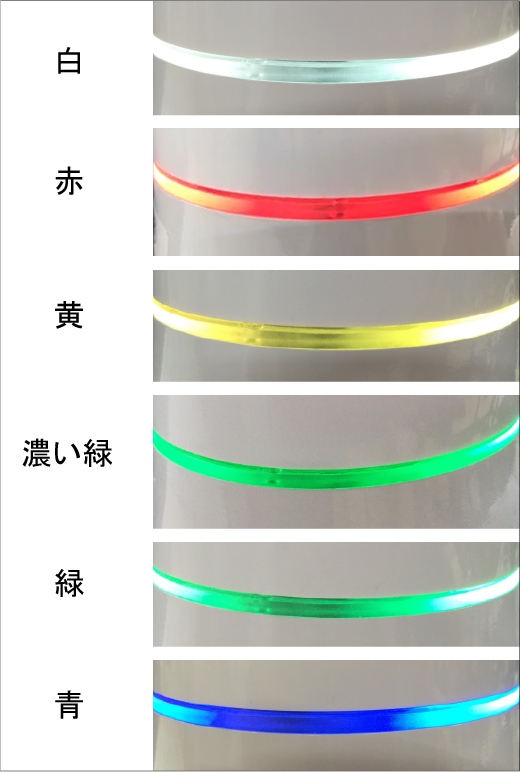
下記に、LEDの色見本を示します。
お使いのモニター設定、お部屋の照明などにより実際のLEDと色味が異なる場合があります。
ID : 7147