
ID : 7004
最適速度制御機能
ロボット動作中の速度と加速度を、最適な状態に自動的に調整する機能です。
この機能は有効 / 無効を選択することができます。
この機能を有効にしないと、ロボットの動作によっては、エラーが発生しやすくなる可能性があります (デフォルトの設定では、有効になっています)。
有効 / 無効の設定は、ロボットの動作種類ごと (PTP動作 / CP動作) に設定できます。
設定方法としては、あらかじめ用意された4種類のモードから選択します。
モードの内容や、各設定の特徴を、下記項目で説明します。
上記項目を参考にして、最適速度制御機能のモードを設定してください。
最適速度制御機能のモード一覧
最適速度制御機能には下記の4種類のモードがあります。
| モード | 最適速度制御機能の有効 / 無効 | |
|---|---|---|
| PTP動作時 | CP動作時 | |
| 3 |
有効 |
有効 |
| 2 |
無効 |
|
| 1 |
有効 |
無効 |
| 0 |
無効 |
|
デフォルトの設定はモード3です。
PTP動作における有効 / 無効設定別の特徴
有効の場合
-
最適速度制御機能を有効にしても、ロボット動作中にエラーが発生する場合があります。下記に最適速度制御機能に関連するエラーが発生した場合の対応方法を示します。
動作中に過負荷エラーが発生する場合があります。その場合は、タイマや内部速度、加速度を設定し、モータ負荷を調整してください。なお、モータ負荷の状況は、リモートTP/バーチャルTPで確認することができます。"サーボの状態表示" を参照してください。
動作中に偏差過大エラーが発生する場合があります。その場合は、速度、加速度を調整してください。
- 無効に設定した場合に比べて、PTP動作時の動作時間が長くなる場合があります。
無効の場合
- 有効に設定した場合に比べて、PTP動作時にエラーが発生しやすくなる可能性があります。
CP動作における有効 / 無効設定別の特徴
有効の場合
-
最適速度制御機能を有効にしても、ロボット動作中にエラーが発生する場合があります。下記に最適速度制御機能に関連するエラーが発生した場合の対応方法を示します。
動作中に過負荷エラーが発生する場合があります。その場合は、タイマや内部速度、加速度を設定し、モータ負荷を調整してください。なお、モータ負荷の状況は、リモートTP/バーチャルTPで確認することができます。"サーボの状態表示" を参照してください。
動作中に指令加速度制限オーバエラー、偏差過大エラー、指令速度過大エラーが発生する場合があります。その場合は、内部速度、内部加速度にて速度、加速度を調整してください。
- 高速動作時最大 5mm程度の軌跡ずれが発生する場合があります。動作近傍に障害物がある場合は、速度を下げて使用してください。
- 特異点近傍で動作速度が低下中に瞬時停止させた場合、瞬時停止時間が延びる場合があります。ただし、瞬時停止距離は変わりません。
- ロボットの動作速度が台形パターンの等速区間においても、速度が変化する可能性があります。
- 無効に設定した場合比べて、CP動作時のロボットの動作時間が長くなる場合があります。
無効の場合
- 有効に設定した場合に比べて、CP動作時にエラーが発生しやすくなる可能性があります。
- ロボットの動作速度が台形パターンの等速区間において、一定の速度に保たれます。
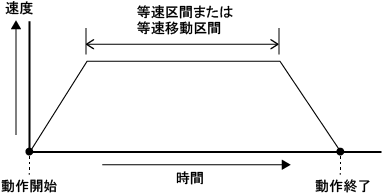
台形パターンについて
ロボットの速度の制御方法として、台形パターンに沿った制御方法があります。これは、ロボットの動作開始時は徐々に速度を上げて、ある速度まで達したら、その速度を保って動作します。動作終了時は徐々に速度を下げていき、最終的に止まります。
速度を保って動作する区間を "等速区間" または "等速移動区間" と呼びます。
モードの選定手順
デフォルトのモードではうまく動作しない場合に他のモードに設定します。
例えば、PTP動作は問題ないが、CP動作においては、等速区間の速度を一定に保ちたい場合を考えます。
この場合、各動作種類ごとの選択すべき有効 / 無効は、下記のようになります。
|
PTP動作 |
有効 |
|---|---|
|
CP動作 |
無効 |
上記条件を満足するモードをモード一覧から選択します。この場合はモード1になります。
ID : 7004
- このページに関連する情報
- 設定が必要な使用条件
- 設定にあたって
- 最適速度制御機能の設定方法