
ID : 6845
手動操作
通常モードでは、リモートTP/バーチャルTPを使って、キー操作でアームを移動することができます。
ダイレクトモードでは、アームを手で押してアームを移動させることができます。
通常モードの手動操作には、「各軸モード」、「X-Yモード」、「TOOLモード」の3種類があります。モードに応じて、方向キーの役割や、キーを押したときのアームの動き方が異なります。
画面上に表示される位置情報も各モードで異なります。
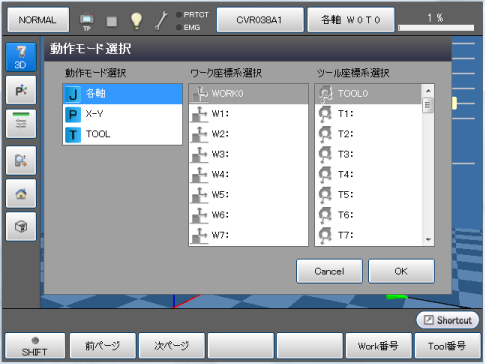
ダイレクトモードでは、[動作モード選択]の選択肢にあるボタンを押すと、画面右上にある[動作モード]ボタンの表示が変化します。しかし、どの動作モードが表示されていても、ユーザは同じようにロボットを動かすことができます。
3種類のモードの切り替え手順については、TPアプリ操作ガイドの「手動操作時のモード変更」を参照してください。
ID : 6845