
ID : 6848
TOOLモード
ここでは、TOOLモードについて、下記項目に分けて説明しています。
TOOLモードの概念
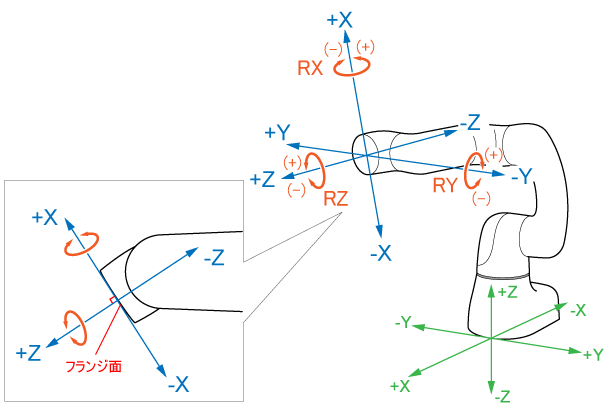
TOOLモードでは、メカニカルインタフェース座標系(原点がフランジ面中心に設定されている)、すなわちツール座標系を基準にしてロボットを動かすことができます。
TOOLモードで[X]キー、[Y]キー、または[Z]キーを操作すると、以下に示すように、ロボットフランジがそれぞれX軸、Y軸、またはZ軸に沿って直線動作します。
TOOLモードで[RX]キー、[RY]キー、または[RZ]キーを操作すると、ロボットアームがツール座標系の各軸のまわりを回転動作します。
下図は、TOOL0に設定した場合のツール座標系です。この座標系はメカニカルインタフェース座標系とも呼ばれています。
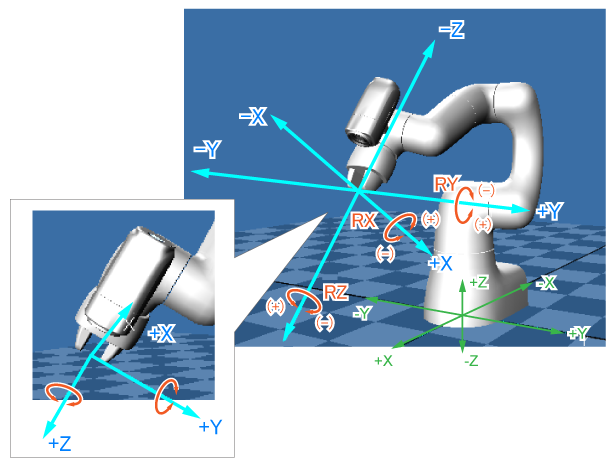
COBOTTA用電動グリッパ装着時のTOOLモード
COBOTTA用電動グリッパが装着されている場合、メカニカルインターフェース座標系は、フィンガの先端かつ、両フィンガの中心になります。
ID : 6848