
ID : 3465
使用準備
ハンドパラメータの設定と接続されたハンドタイプが異なる場合、COBOTTA起動時にエラーメッセージが表示されます。
また、ハンド画面を表示する際もシステムメッセージが表示されます。
上記のメッセージが表示される場合は、下記の手順でハンドパラメータの設定を変更してください。
ハンドパラメータの設定は、リモートTPまたはバーチャルTPを操作して行います。
リモートTP/バーチャルTPの使用方法については、 "TPアプリ操作ガイド" を参照してください。
ハンドパラメータの確認
1
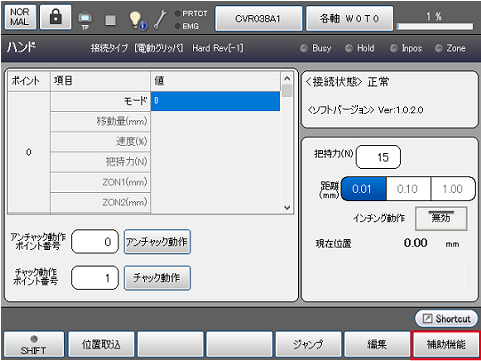
以下の経路でハンドパラメータの設定画面を開きます。
操作経路 : 基本画面 - [F9 ハンド] - [F6 補助機能]
2
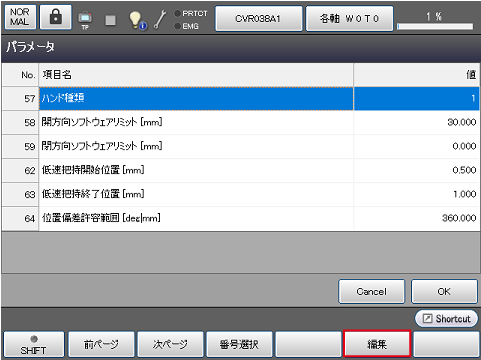
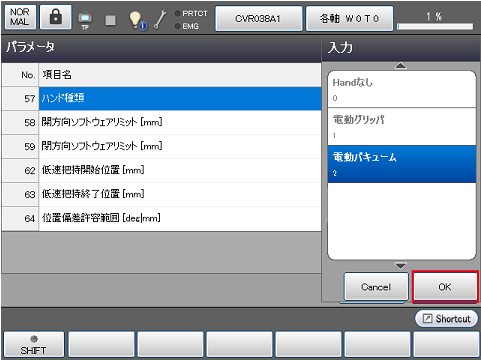
[57 : ハンド種類]を選択し、[F5 編集]ボタンを押します。
3
入力ウィンドウが開きますので、[電動バキューム]を選択し、[OK]ボタンを押します。
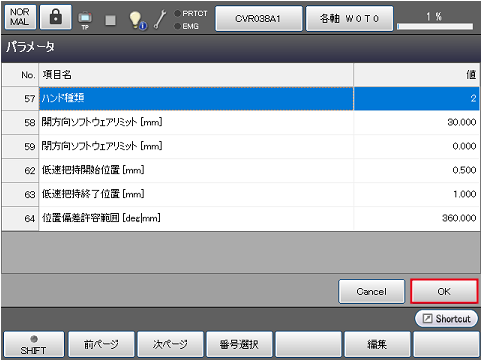
4
パラメータ画面で[OK]ボタンを押します。
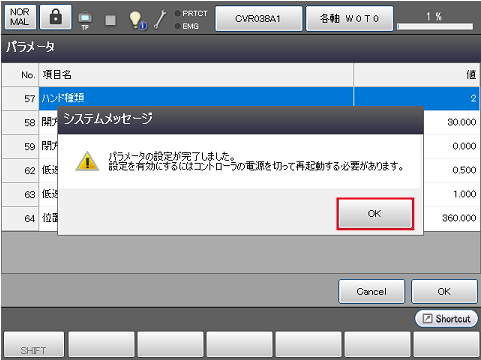
5
パラメータの変更が成功すると、システムメッセージが表示されますので、[OK]ボタンを押してメッセージを消します。
COBOTTAの電源をいったん切り、再投入します。
いったん電源を切って、再投入しないと、このパラメータ設定は有効になりません。
ハンドの種類を[電動バキューム]に変更すると、下記のパラメータが自動で変更されます。
| パラメータ | 変更内容 |
|---|---|
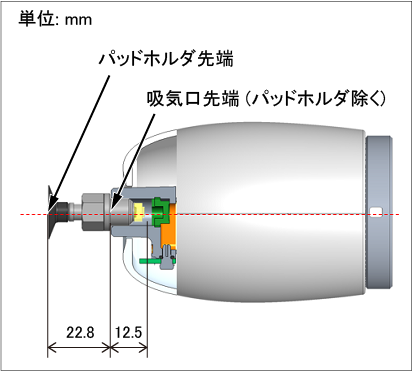
| ツール定義 | デフォルトのツール先端(Tool 0)がパッドホルダを除いた電動バキュームの吸気口先端になります。
工場出荷時には、吸気口にパッドホルダと真空パッドが取り付けられています。 出荷時に取り付けられているパッドホルダの高さ(吸気口先端からパッド底面までの高さ)は22.8mm です。この場合のツール定義は、以下の値になります。 |
| 先端負荷質量の最大値 | デフォルト値から電動バキュームの質量が減算されます。 カメラが有効化されている場合は、カメラ質量も減算されます。 |
ID : 3465