
ID : 11274
力量控制Log
操作路径:[F2 机械臂] - [F2 力量控制] - [F2 力量控制Log]
图表中显示获取的各轴移动指令值、移动当前值、臂前端指令值、臂前端当前值、传感器值的log。
在WINCAPSIII中收到控制Log时,也会一起收到力量控制Log。收到的力量控制Log可以从WINCAPSIII的[文件]菜单,以CSV格式的文件输出。
力量控制Log的显示
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] - [F2 力量控制Log]
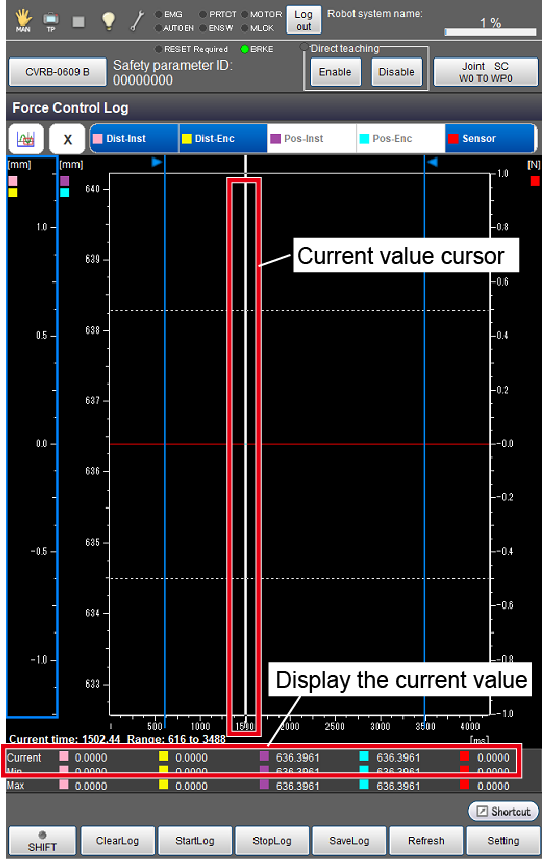
图表较宽的部分为力量控制动作部位。
触摸左上角的图标后显示下拉菜单,可变更图表的操作模式。图表的操作模式有以下4种。
| 操作模式 | 说明 | 左右键 |
上下键 | 触摸画面 |
|---|---|---|---|---|
 移动显示位置 |
移动图表轴的显示位置。 | 移动X轴的显示位置。 | 移动所选Y轴的显示位置。 | 移动X轴的显示位置。 |
 变更显示尺寸 |
增减图表轴的显示范围。 | 增减X轴的显示范围。 | 增减所选Y轴的显示范围。 | 移动X轴的显示位置。 |
 更改选择范围 |
详细情况请参照“下述内容”。 | 移动X轴的选择范围光标。 | 不使用。 | X轴的选择范围光标将移动至触摸位置。 |
 查看当前值 |
显示所选位置的值。所选位置为执行机器人动作命令的位置时,图表右上角显示[程序]、[行编号]。 | 当前值的光标移动。 | 不使用。 | 当前值的光标移动至触摸位置。 |
| 功能键以外的键 | |
|---|---|
|
|
如果按压按钮,则显示下拉菜单。 可显示X、Y、Z、Rx、Ry、Rz各轴的数据。 |
| 移动量指令值 |
显示移动量指令值信息。 |
| 移动量当前值 | 显示移动量当前值信息。 坐标系为力量控制坐标系。 选择后,显示黄色的图表。 |
| 臂前端指令值 |
显示臂前端指令值信息。 |
| 臂前端当前值 |
显示臂前端当前值信息。 |
| 传感器值 |
显示传感器值信息。 |

| 可使用的功能键 | |
|---|---|
| [F1 清空] | 取消获取的力量控制Log信息。 |
| [F2 开始记录] | 开始获取力量控制Log。 |
| [F3 停止记录] | 结束获取力量控制Log。 |
| [F4 保存] | 保存获取的力量控制Log信息。 |
| [F5 显示更新] | 将智能TP的力量控制LOG显示画面更新为最新的信息。 |
| [F6 设定] | 显示[设定力量控制Log]视窗。 可进行力量控制Log相关设定的确认和变更。 |
| [F7 Y轴显示方向切换] | 图表Y轴刻度的显示形式变更为纵向/横向。 将Y轴刻度设定为纵向,可扩大图表的显示领域。 |
| [F8 显示范围变更] | 变更X/Y轴的显示范围。 按压[F8 显示范围变更]后显示[显示范围变更]画面,从下面选择显示范围的变更方法。
|
力量控制Log或传感器值的监视画面中显示的值为修正后的值,因此可能与力感应器的实际检测值不一致。因此,即使实际检测值未超出指定值,画面中也可能显示超出值。相反,即使实际检测值超出指定值,画面中也可能显示未超出值。
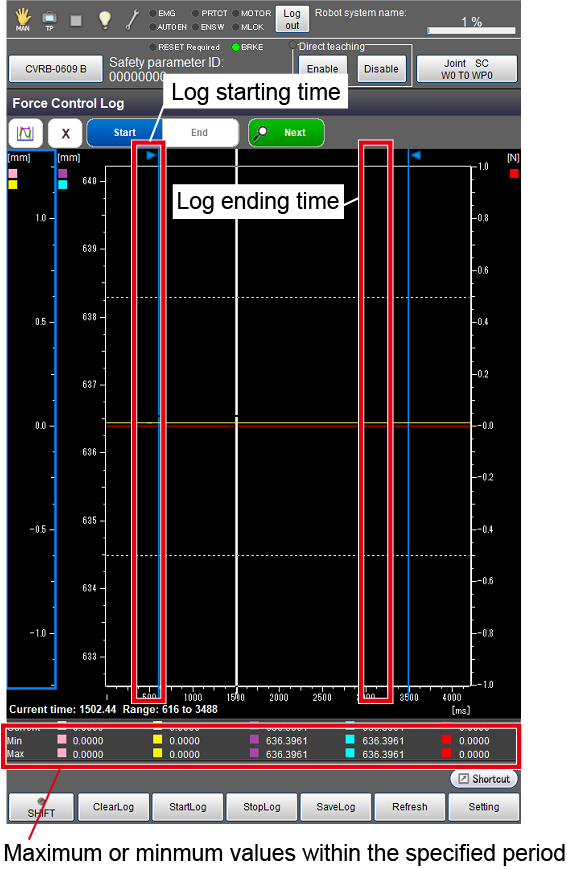
更改选择范围
| 键 | 功能 |
|---|---|
| 开始位置 | 可进行开始位置的设定。 |
| 结束位置 | 可进行结束位置的设定。 |
| 下一检索 | 转移至开始下一力量控制的部位。 |
样品程序
获取力量控制Log的样品程序如下所示。
在力量控制设为有效前开始获取Log。结束力量控制后结束获取Log。
Sub Main
TakeArm Keep = 0
Motor On
'初始位置
Move L, P4+(0,0,10)
ClearLog
StartLog
'将当前值设为零点(0N|0Nm)
ForceSensor 0
Delay 1000
'在工作台编号1的设定中将力量控制设为有效
ForceParam 1,1,P(0,0,30,0,0,0),Damp = P(100,100,100,100,100,100),SPMax = 100
'开始力量控制
ForceCtrl True, 1
'待机至条件成立
ForceWaitCondition Force = P(0,0,5)
'动态变更控制参数
ForceParam 1,1,P(0,0,10,0,0,0), Damp = P(100,100,100,100,100,100), SPMax = 100
'绕Rz旋转
Drive (6,45), Speed = 20, Next
Delay 10000
'结束力量控制
ForceCtrl False
'动作结束
Move P, P4+(0,0,10)
StopLog
End Sub
ID : 11274
- 本页相关信息
- 力量控制Log的设定