
ID : 11079
臂参数的设定
在协调各轴的状态下进行CP动作(直线)时设定。
通过智能TP进行设定
1
按基本画面 - [F2 机械臂] - [F12 维护] - [F10 轴设定] - [F2 机械臂设定]。
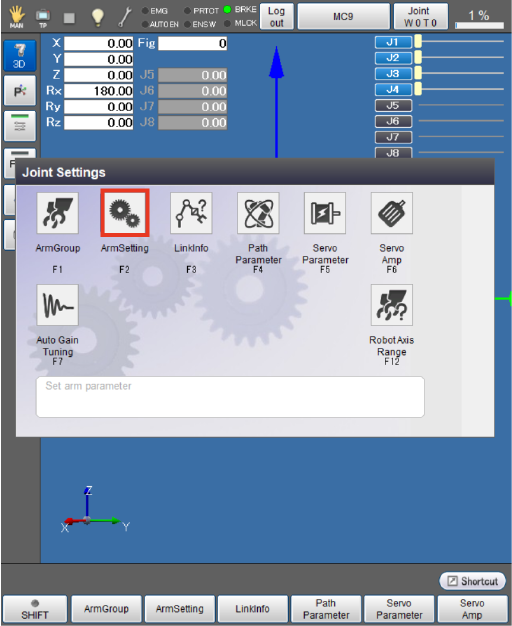
显示“机械臂设定”画面。
2
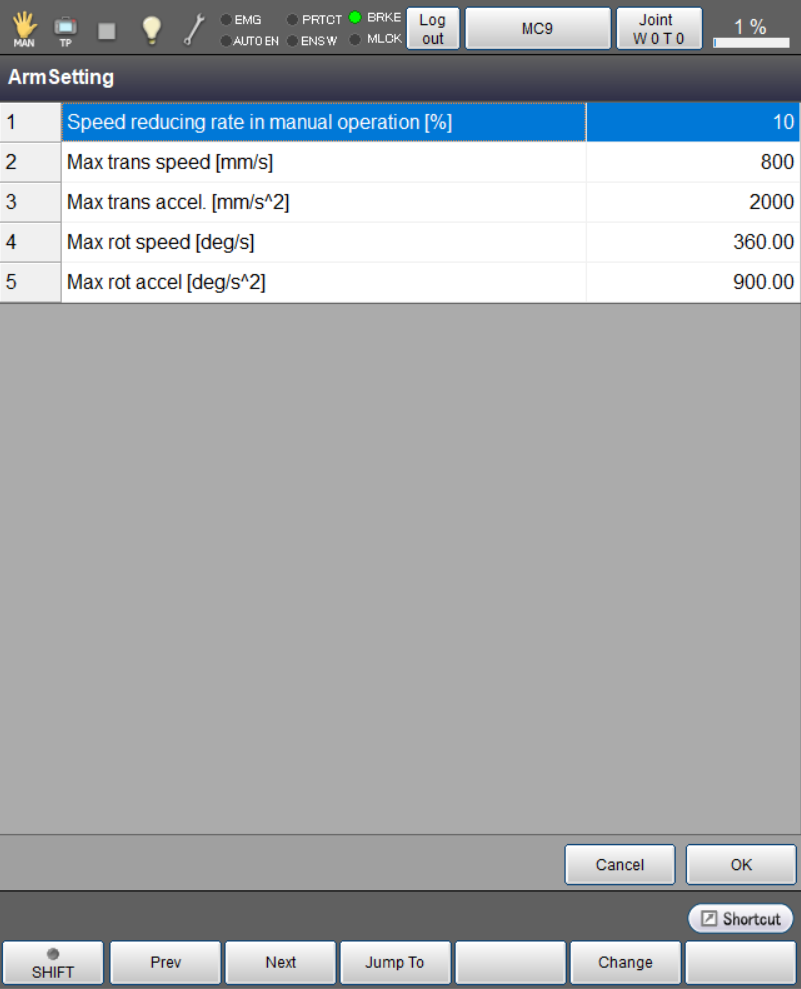
变更机械臂参数的各设定,按[OK]。
有关各参数的详细内容,请参照“机械臂参数一览”。
3
全部机械臂参数设定结束后,按[OK]。
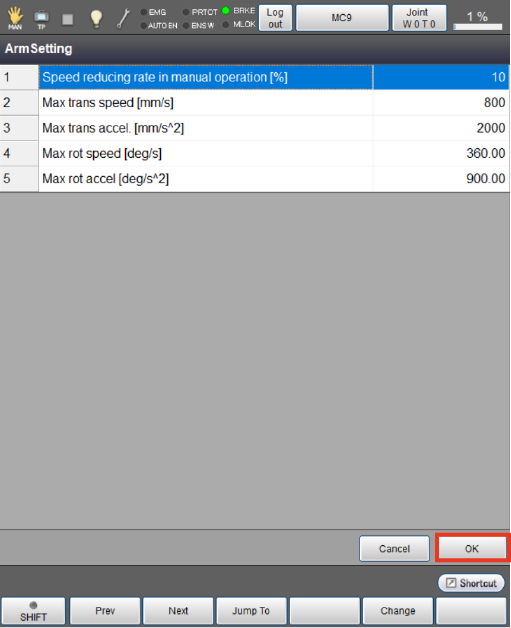
保存登录的机械臂参数设定,返回“轴设定”画面。
手动操作时的减速比例仅能通过智能TP设定。
通过WINCAPSIII设定
1
操作路径 : 选择[项目] - [轴设定表]。
显示“轴设定”画面。
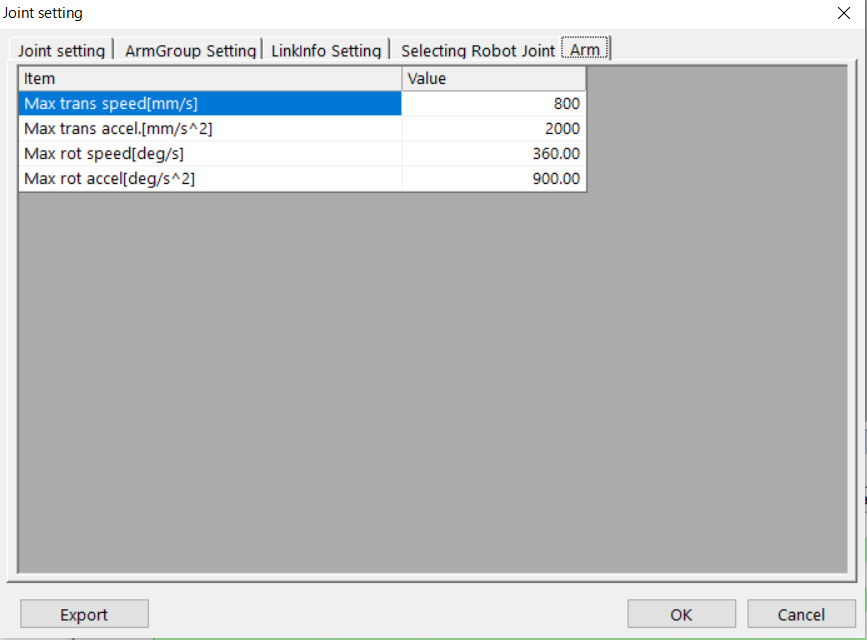
选择[机械臂设定]标签。
设定参数,按[OK]。
2
选择[通信] - [发送接收数据],显示“发送接收数据”画面。
选择WINCAPSIII - [参数] - [臂 参数],发送至控制器。
参数设定后不需要重新接通控制器电源。
臂参数一览
| 参数名称 | 设定范围 | 出厂设定值 | 单位 | 内容 |
|---|---|---|---|---|
| 手动操作时的减速比例 | 1~50 | 10 | % | 将手动操作时的减速比例限制在自动时的10%以下。 |
| 最大并进速度 | 1~100000000 | 800 | mm/s | 设定CP动作时的最大并进速度。 |
| 最大并进加速度 | 1~100000000 | 2000 | mm/s2 | 设定CP动作时的最大并进加速度。 |
| 最大旋转速度 | 0.01~1000000 | 360.00 | deg/s | 设定CP动作时的最大旋转速度。 |
| 最大旋转加速度 | 0.01~1000000 | 900.00 | deg/s2 | 设定CP动作时的最大旋转加速度。 |
ID : 11079
- 本页相关信息
- 手动操作时的减速比例的设定