
ID : 10773
通过智能TP进行设置(5度动作确认)
CALSET完成后进行机器人的动作确认,以确认机器人控制器接收的VL初期设定数据是否正确。
确认是否能够通过手动操作使各轴移动5度以上。
按照以下步骤进行。
1
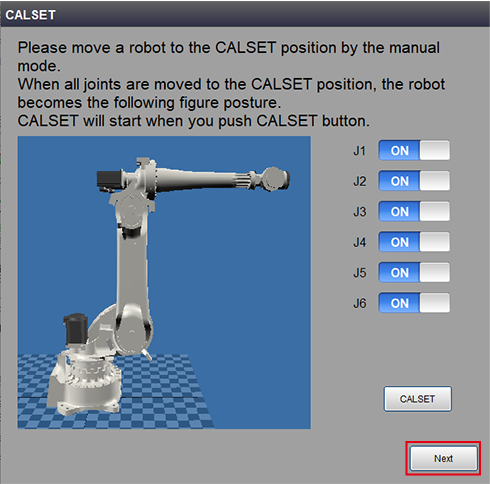
CALSET完成后,返回CALSET画面。
按[下一步]。
如果在CALSET后不进行从恢复状态退出的操作,则会继续处在恢复状态。
3
显示确认哪一个轴已完成动作确认的画面。显示该画面时,通过手动操作移动机器人的各轴。
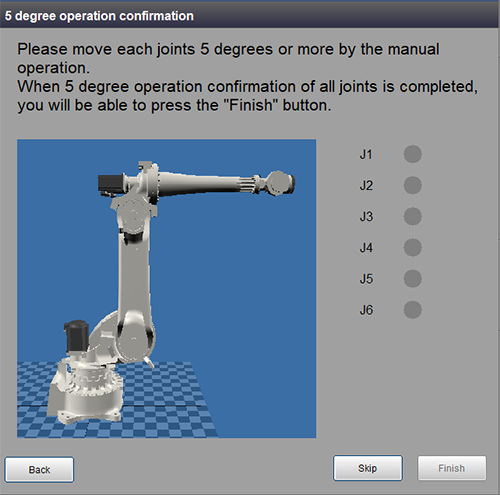
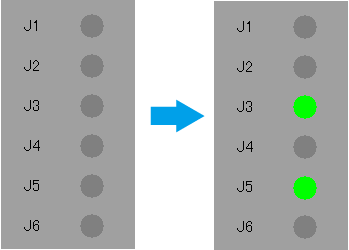
完成5度以上动作的轴指示灯从灰色变成绿色。
在所有轴的指示灯变成绿色之前,[完成]按钮不能按下。
如果在手动操作中频发位置偏差过大,请联系售后服务。
4
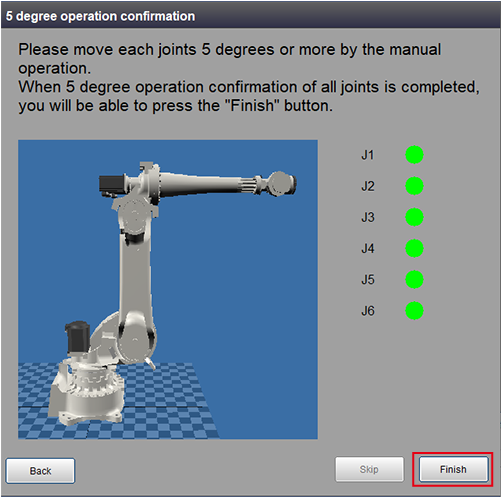
所有轴的动作确认完成后,画面的[完成]按钮变为有效。
5
按压[完成]。
在按压完成时恢复状态有效的情况下,恢复状态将自动变为无效。
至此,VLA的设置完成。 可移动VLA。
设置完成后,再次通过手动操作移到CALSET位置,目视确认各轴的可动基准切口和固定基准切口一致。
如果偏离,请再次发送VL初期设定数据,重新进行设置。
如果仍然偏离,请参照“CALSET操作”实施CALSET。
ID : 10773