
ID : 10772
通过智能TP进行设置(CALSET)
VL初期设定数据的接收处理完成,重启机器人控制器后,按顺序进行VLA的设置(CALSET和动作确认)。
首先按照以下步骤进行CALSET。
1
重启机器人控制器后,显示安全注意事项画面。
按压OK。
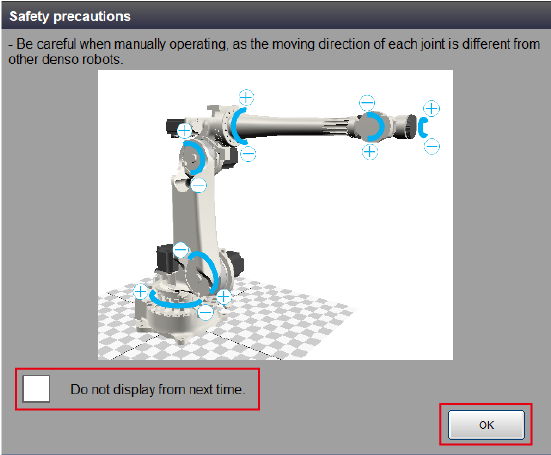
在初期设定中,该画面在接通控制器电源时每次都会显示。触摸“从下次开始不显示”复选框并勾选后,从下次接通电源起开始将不显示。此功能可在Ver.1.1.*以后使用。
2
显示提醒登录的画面后,按压[登录]。
3
显示登录画面。
选择初始帐户的“Administrator”。输入密码“1234”,按压[OK]。
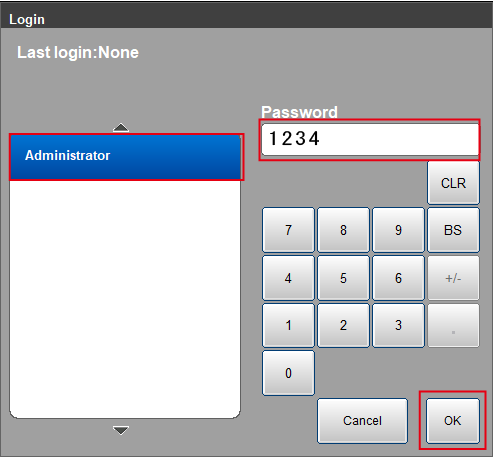
如果更改初始帐户,请用具有维护或风险评估权限的用户登录。设置需要用户等级为维护以上才可以。
4
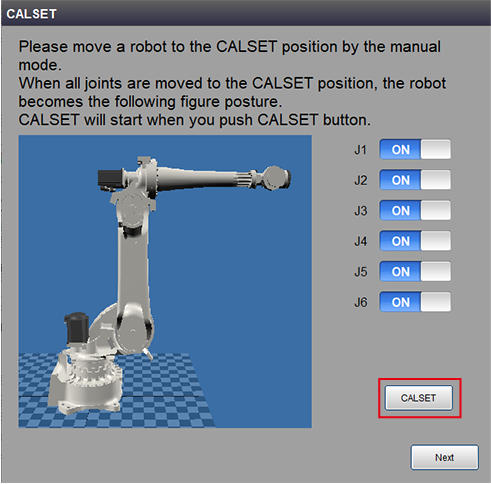
显示CALSET画面。
将机器人变更为手动模式。
如果显示信息框,按压OK,则恢复状态变为有效。
通过手动操作将机器人移到下图的CALSET位置。
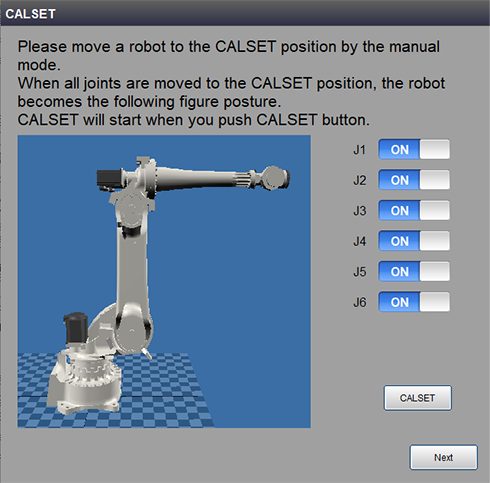
- CALSET时的轴位置
1轴 2轴 3轴 4轴 5轴 6轴 0° 0° -90° 0° 0° 0°
如果在手动操作中频发位置偏差过大,请联系售后服务。
- 目视使各轴的可动基准切口和固定基准切口一致。需要使用定位传送用千分尺。
- 如果是自动模式,需要变更成手动模式。
- 初次电机ON时,显示以下2个画面时请按[OK]。
5
确认所有的轴都为[ON],按压[CALSET]。
6
显示确认是否执行CALSET的画面后,按压[OK]。
开始CALSET。
7
CALSET完成后,显示成功画面,然后按压[OK]。
至此,CALSET结束。
ID : 10772