
ID : 10723
确认施加在机器人臂前端的力
在此对以下项目进行说明。
力的容许值
设计/选定机器人夹工具时,以下项目不得超过机器人规格。(参照机器人本体规格)
- 最大可搬运质量
- 最大容许惯量(惯性力矩)
- 最大容许力矩
在与以上项目的比较中,不仅是工具,固定工具的金属零件、毛坯及配线·配管等给法兰造成负载的产品,全部都要考虑在内。
另外,不要使工具(包括毛坯)振动。
如果不遵守上述内容,则机器人本体的各紧固部位发生松动、晃动,可能引起错位并损坏机器人和机器人控制器。
持续进行微低速动作时,可能发生过载错误。
根据重量和重心的位置确认是否在容许值范围内的方法
计算施加在机器人臂前端的惯性力矩及力矩时,需要将工具及毛坯等给法兰造成负载的物品(以下称 法兰承受总负荷)形状套入各力的计算公式中。
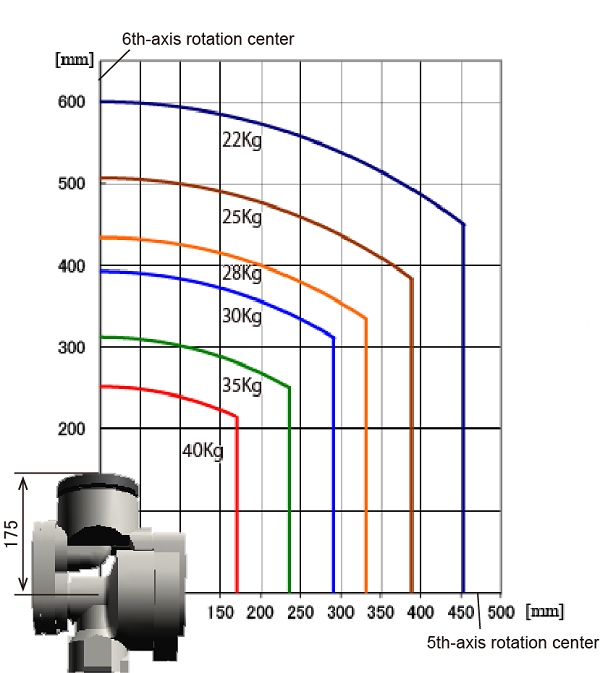
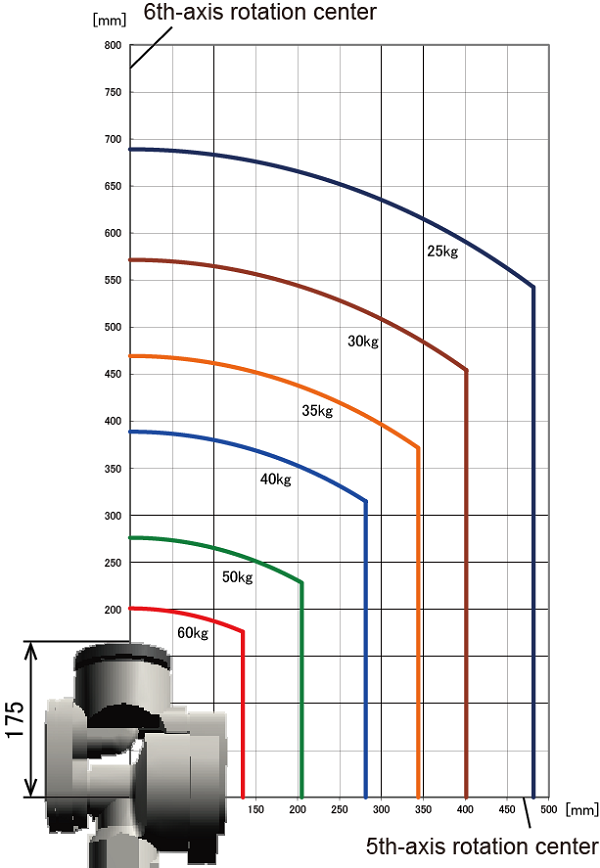
但是,如果知道法兰承受总负荷的重量和重心位置,可使用下图的图表确认是否在容许值的范围内。
下图是按不同重量表示机器人的6轴及5轴旋转中心到法兰承受总负荷的重心位置的距离在允许范围内的程度。
例如,说明法兰承受总负荷重量为25 kg的情况。此时,如果法兰承受总负荷的重心位置在图中的“25 kg”框内,就可以判断法兰承受的惯性力矩及力矩在容许值以内。
但是,下图的图表为法兰承受总负荷体积较小的情况。如果法兰承受总负荷体积比较大,请参考“惯性力矩的计算方法”计算出各力,确认在允许值以内。
VLA-4025
VLA-6022
惯性力矩的计算方法
在计算法兰承受总负荷施加在4轴、5轴、6轴旋转的惯性力矩时,请参考以下计算公式。
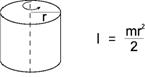
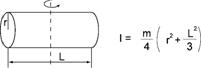
1.圆柱(1) (旋转轴=中心轴)
|
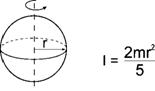
4.球 (旋转轴=中心轴)
|
2.圆柱(2) (旋转轴通过重心)
|
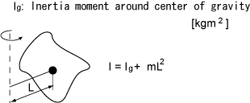
5.重心位置未在旋转轴上
|
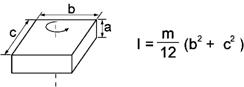
3.长方体 (旋转轴通过重心)
|
I : 惯性力矩[kgm2] m : 质量[kg] r : 半径[m] a、b、c、L : 长度[m] |
计算示例
计算复杂形状的惯性力矩时,尽可能将其分割成简单的部分进行计算。
分割成下图所示的3部分(1)、(2)、(3)进行计算。
6轴旋转惯性力矩
|
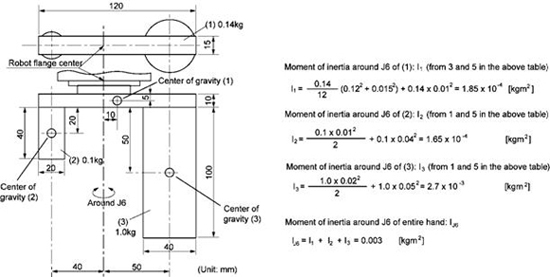
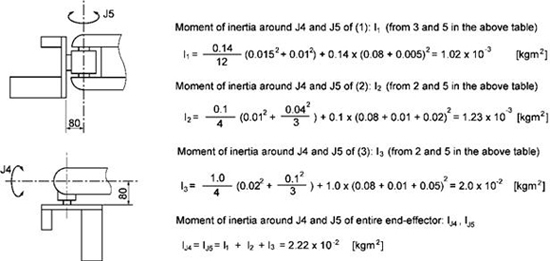
4轴、5轴旋转惯性力矩
为下图所示情况时,可通过相同方法计算4轴、5轴旋转惯性力矩。
|
对机器人法兰盘承受最大负荷和前臂承受追加负荷的定义方法进行说明。
ID : 10723
- 本页相关信息
- 施加追加负载时的允许载荷和重心位置