全文检索
指令检索
选择菜单
查阅本书的方法与操作方法
Detailed Description of Commands (By Functions)
机器人动作创建基本
智能TP操作指南
小型教导器操作指南
WINCAPSIII指南
错误列表
Parameter List
Description of Each Function
VM系列机器人的产品信息
VM系列机器人的安装
VM系列机器人的维护
安全注意事项
VL系列机器人的维护
VL系列机器人的产品信息
VL系列机器人的安装
MC9系列的产品信息
MC9系列的维护
MC9系列的安装
PacScript的详细说明
ID跳过
AND
OR
文字大小
小
中
大
HOME
设置
VLA系列机器人的安装
安装、连接步骤
机器人本体
机器人本体的搬运方法
使用叉车抬起机器人(托盘)
<< 向前
下一页 >>
安全注意事项
产品信息
设置
机器人动作创建
维护
付録
ID : 10651
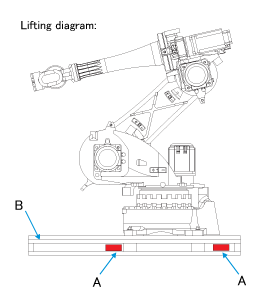
使用叉车抬起机器人(托盘)
抬起装置
具有足够能力抬起载货的叉车
使用器材
叉车 货叉长度 约 1000mm
搬运前请注意以下事项。
将各轴移动到合适搬运姿势的角度。
搬运时请注意以下事项。
请调整成货叉A的中间距离约780mm。
确认货叉A的一端从托盘B的另一侧伸出。
请小心抬起机器人,移动到安装场所附近。
ID : 10651
<< 向前
下一页 >>
返回顶部
 HOME
HOME