
ID : 9697
机械臂辅助功能的显示和设定
操作路径:[F2 机械臂]-[F6 辅助功能]
显示进行以下设定的菜单:机器人运行中各种使用条件的设定、“工具坐标”和“工件坐标”的设定、“区域”的设定等。
如果按压[F6 辅助功能],则显示以下[机械臂辅助功能]画面。
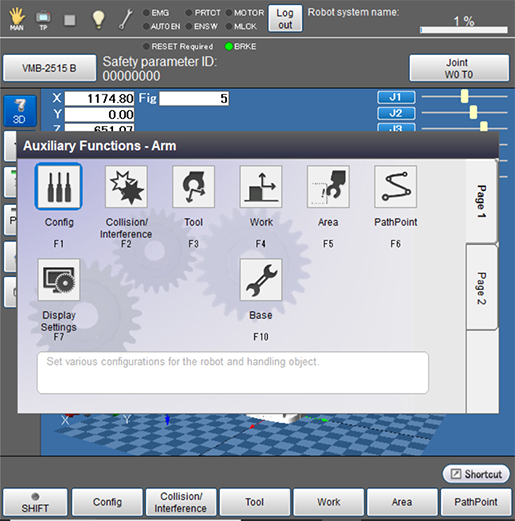
| 可使用的功能键 | ||
|---|---|---|
| 页面1 | [F1 使用条件] |
显示[使用条件]画面。 对机器人的前端负载质量等机器人运行中的各种使用条件进行设定。 |
| [F2 碰撞/干涉] | 进行与碰撞/干涉相关的设定/操作。 | |
| [F3 工具] |
显示[工具设定]画面。 |
|
| [F4 工件] |
显示[工件设定]画面。 进行“工件坐标系”的设定。 |
|
| [F5 区域] |
显示[区域设定]画面。 进行“区域”的空间设定。 |
|
| [F6 路径点] | 设定路径点。 | |
| [F7 显示设定] | 进行[机械臂]画面显示项目的设定。 | |
| [F10 基准] | 显示[基础设定]画面。(Ver.1.3.*或更高版本) 设定从世界坐标系观察到的机器人基础位置。 |
|
| 页面2 | [F6 Fig自动补偿] | 切换获取位置时的Fig自动补偿设定。 |
ID : 9697