
ID : 11150
機能の使い方
TwinCAT Motion連携機能は、TwinCATコンポーネントオブジェクトモデル(TcCOM)を使用して、PLCからロボットにへ様々な指令を出すことができます。
モジュールの追加方法
TcCOM モジュールの追加方法を説明します。
1
RC9にTwinCAT Motinon連携機能のライセンスを登録し、RC9を再起動します。
再起動後、WINCAPSIIIにてコントローラから[TwinCAT XAE]のデータを受信します。
2
データの受信が完了したら、プロジェクトを保存します。
モジュールの定義ファイル(拡張子xtiのファイル)は、プロジェクトフォルダ内の[TwinCATData]に保存されます。
3
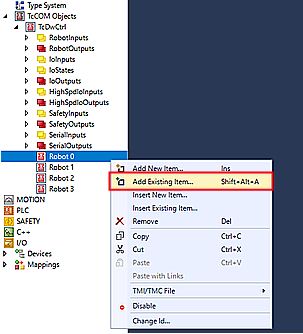
モジュールの定義ファイルをTwinCAT XAE Shellにインポートします。
このとき、"TcDwNcCtrl"は、[TcDwCtrl] を右クリックして[Insert Existing Item...]選択してください。
それ以外のモジュールは、[Robot *] を右クリックして[Insert Existing Item...]を選択してください。
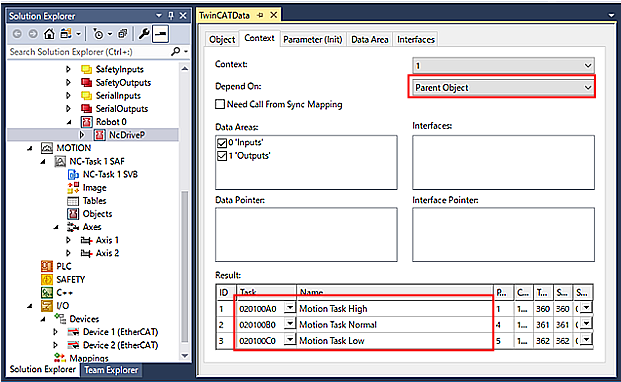
コンテキストの設定
コンテキストは、下図のように設定してください。
この設定は、すべてのモジュールに実施してください。
ID : 11150