
ID : 11094
RC8シリーズロボットコントローラの設定
RC8シリーズコントローラの設定
以下の仕様のRC8シリーズコントローラはMC9シリーズに接続することはできません。
- セーフティモーション仕様
- デュアルアーム仕様
1
以下のオプションとライセンスを、MC9シリーズへ接続するRC8シリーズロボットコントローラへ追加します。
- EtherCATスレーブボード
- EtherCAT Slave Motionライセンス
増設ボードの取り付け方法、機能についてはそれぞれ、RC8シリーズユーザマニュアルの下記取扱説明書をご覧ください。
- EtherCATスレーブボード取扱説明書(ID : 5783)
- EtherCAT Slave Motion取扱説明書(ID : 2956)
2
RC8シリーズコントローラに接続しているロボットや、付加軸の設定を行います。
設定完了後、手動動作などを行い意図した動作を行えるかを確認してください。
RC8シリーズコントローラの設定に関しては、RC8シリーズユーザマニュアルを参考にしてください。
例
- 立上げハンドブック(ID : 5193)
- 付加軸取扱説明書(ID : 4868)
- 外部付加軸(EtherCAT)取扱説明書(ID : 2946)
MC8コントローラをMC9シリーズに接続する場合、MC8コントローラ側でキネマティクス設定を行う事はできません。
MC9シリーズでMC9キネマティクス設定を行ってください。
3
RC8シリーズロボットコントローラの設定が完了後、MC9シリーズと接続するためのパラメータを設定します。
ティーチングペンダントから設定する場合
1
SlaveMotion設定画面を開きます
この操作を行うには、ユーザレベルを"メンテナ"に指定してください。
ユーザレベルの指定方法は、RC8シリーズユーザマニュアルのID : 1772を参照してください。
操作手順 : [基本画面] - [F6 : 設定] - [F5 : 通信と起動権] - [F5 : SlaveMotion設定]
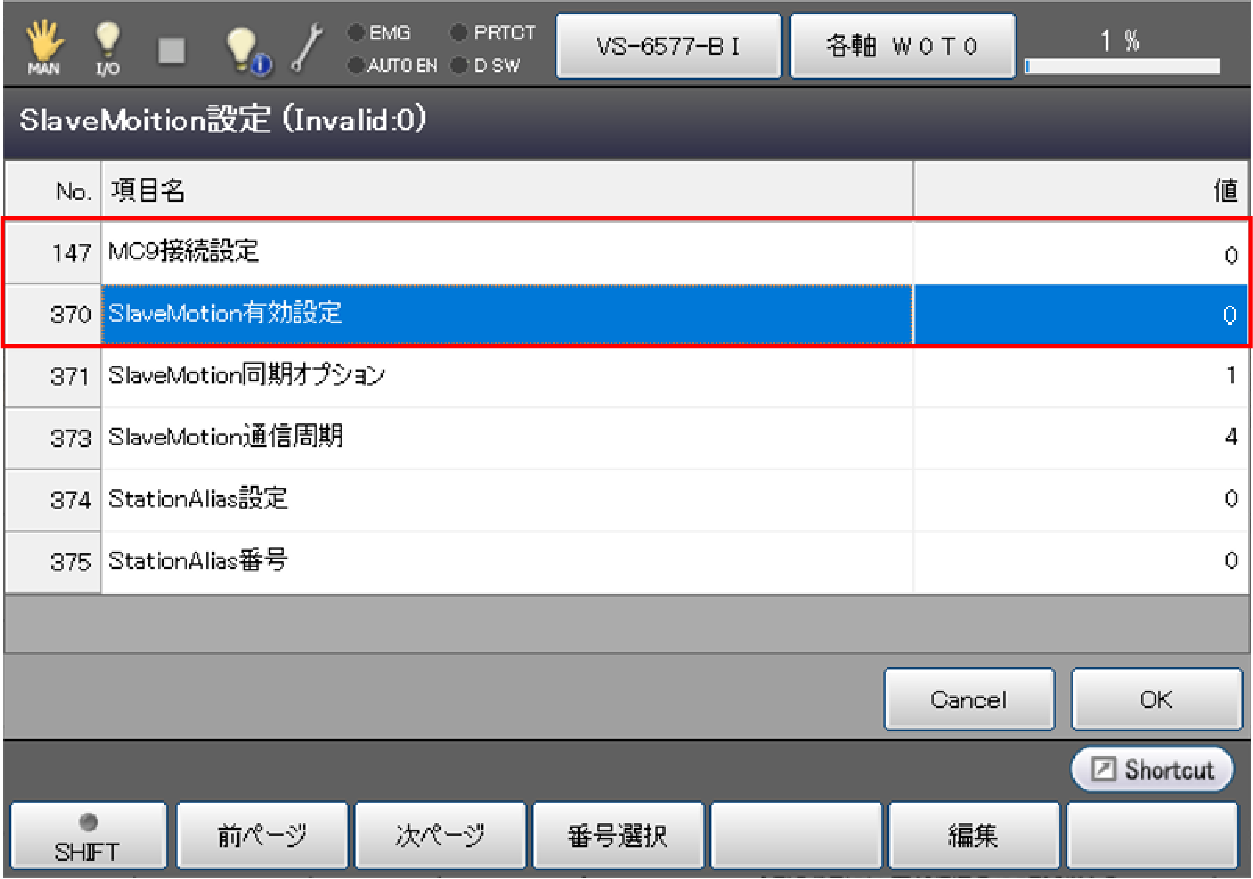
2
[147:MC9接続設定]、[370:SlaveMotion有効設定]を[1:有効]に設定し、[OK]を押します。
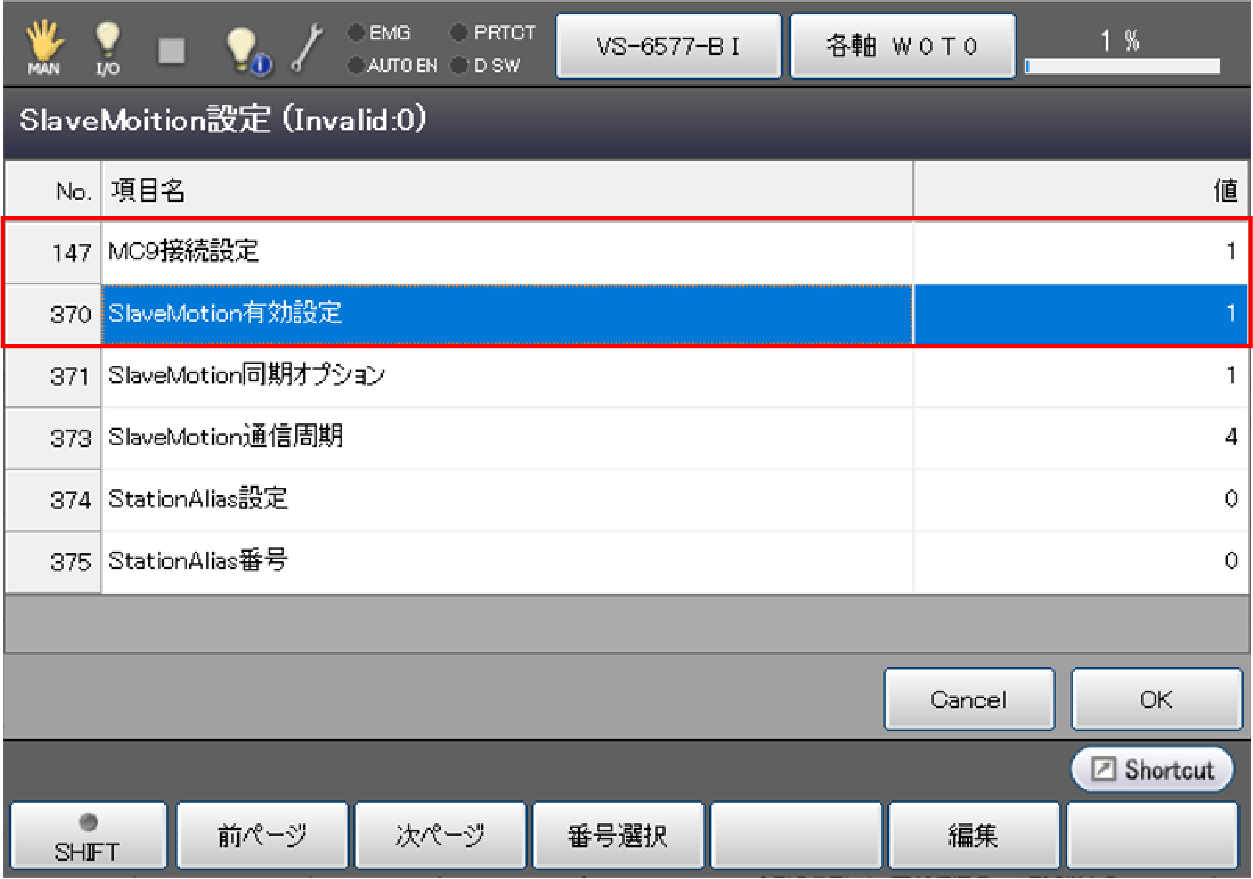
設定が終了したら、再起動してください。
WINCAPSIIIから設定する場合
1
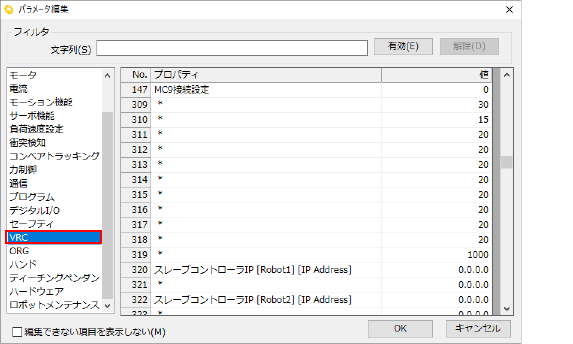
設定を行いたい、RC8ロボットのプロジェクトを開きます。
プロジェクトを開いたら、パラメータ編集画面を開き、VRCパラメータ画面を開きます。
操作手順 : [プロジェクトタブ] - [パラメータ] - [VRC]
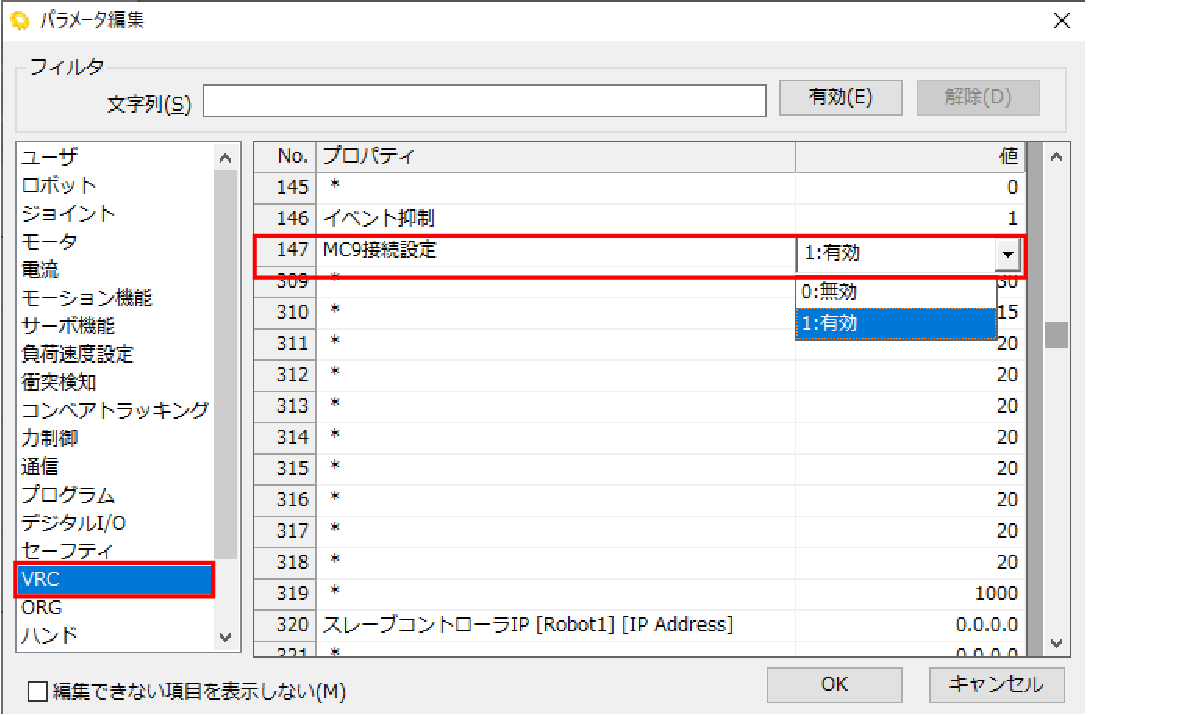
2
[147:MC9接続設定]を[1:有効]に設定し、[OK]を押します。
3
[370:SlaveMotion有効設定]を[1:有効]に設定し、[OK]を押します。
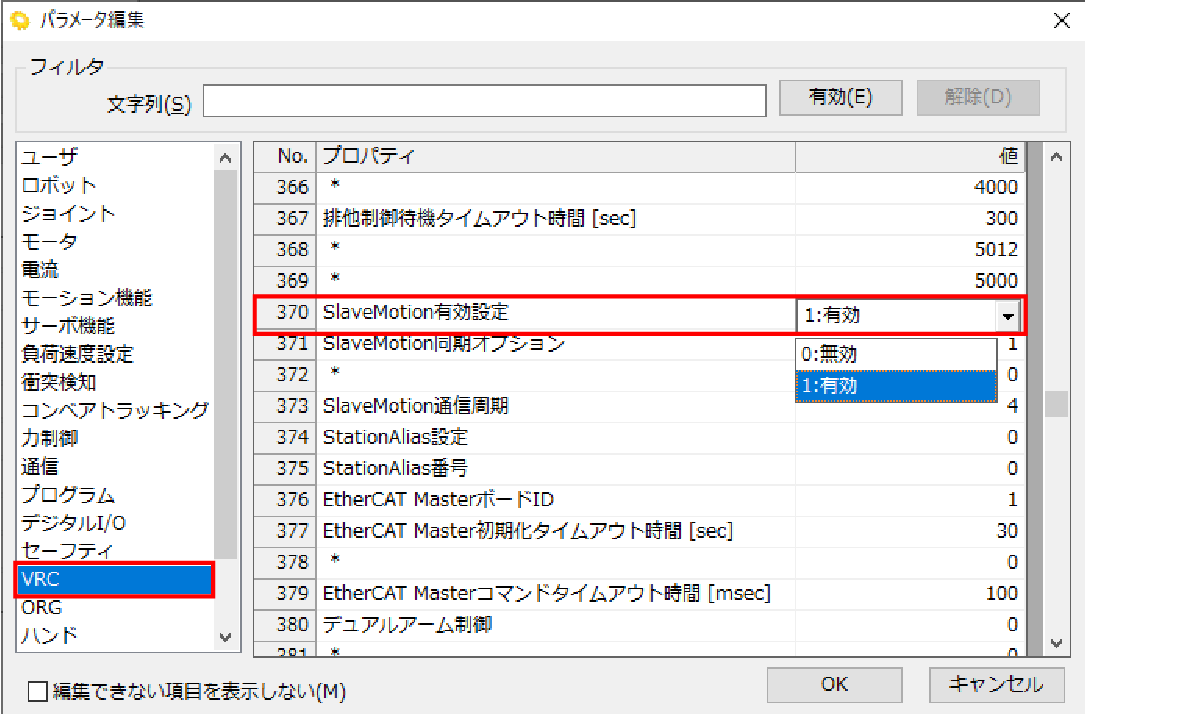
変更後、RC8シリーズコントローラへパラメータ送信を行ってください。
詳細については、RC8シリーズユーザマニュアルのID : 4409とID : 4410を参照してください。
送信完了後、RC8シリーズコントローラを再起動してください。
MC9シリーズとの接続設定を行うと、ティーチングペンダントやミニペンダントを接続した際にレベル5エラーが発生し、ペンダントの非常停止入力以外の機能を利用することができなくなります。
ID : 11094
- このページに関連する情報
- RC8シリーズロボットコントローラのHand I/O設定