
ID : 11092
MC9シリーズの設定
MC9シリーズと、RC8シリーズコントローラを接続する場合、対象のロボットと同一機種、同一設定のMC9用プロジェクトを作成する必要があります。
1
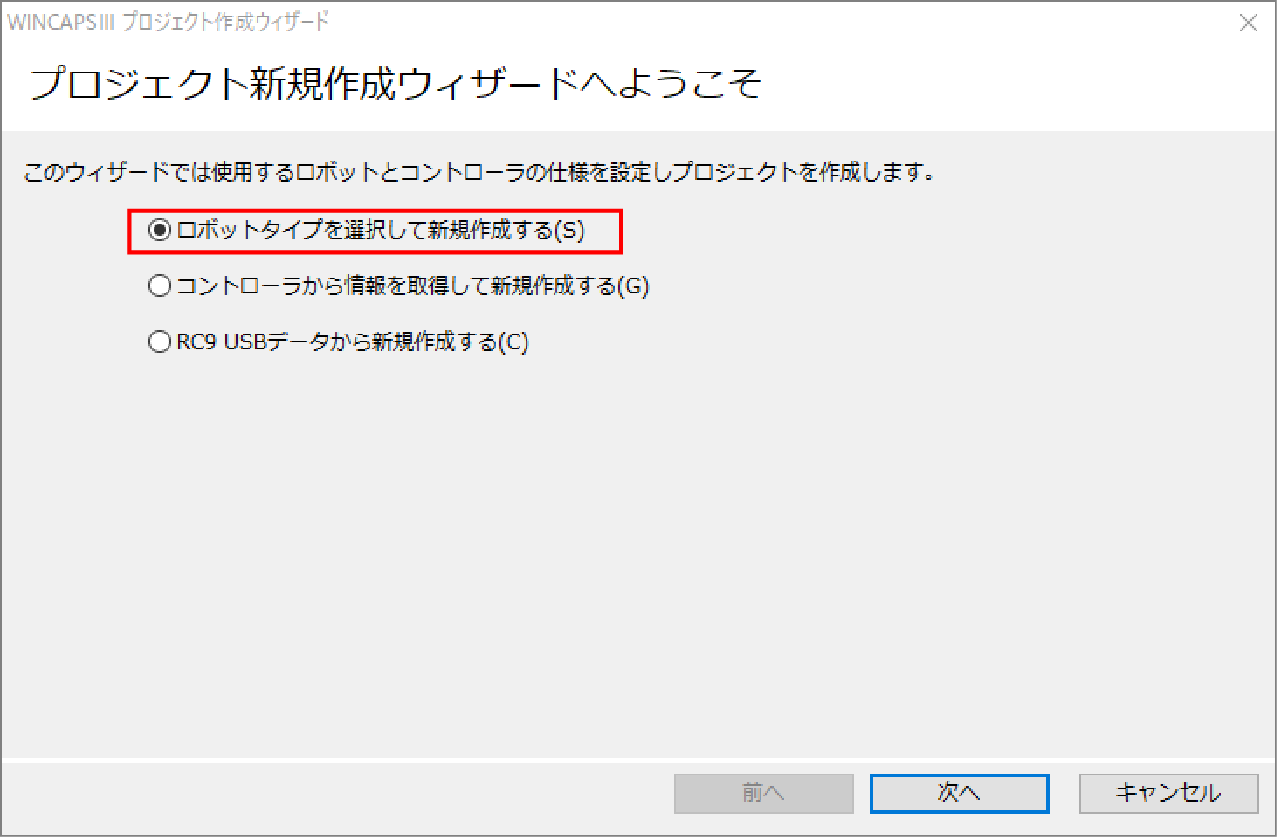
WINCAPSIIIを開き、プロジェクト作成ウィザードを開きます。
[ロボットタイプを選択して新規作成する]を選択し、[次へ]を押します。
操作経路 : [ファイルタブ] - [プロジェクト新規作成]
2
ウィザードに従って各項目を接続したいロボットと同様の設定になるように設定します。
「ロボットタイプを選択して新規作成」の場合の設定項目は、以下の6項目です。
- プロジェクト名の設定
- ロボットタイプの選択
- コントローラオプションの選択
- 接続方法の選択
- 変数の設定
- I/Oポートの設定
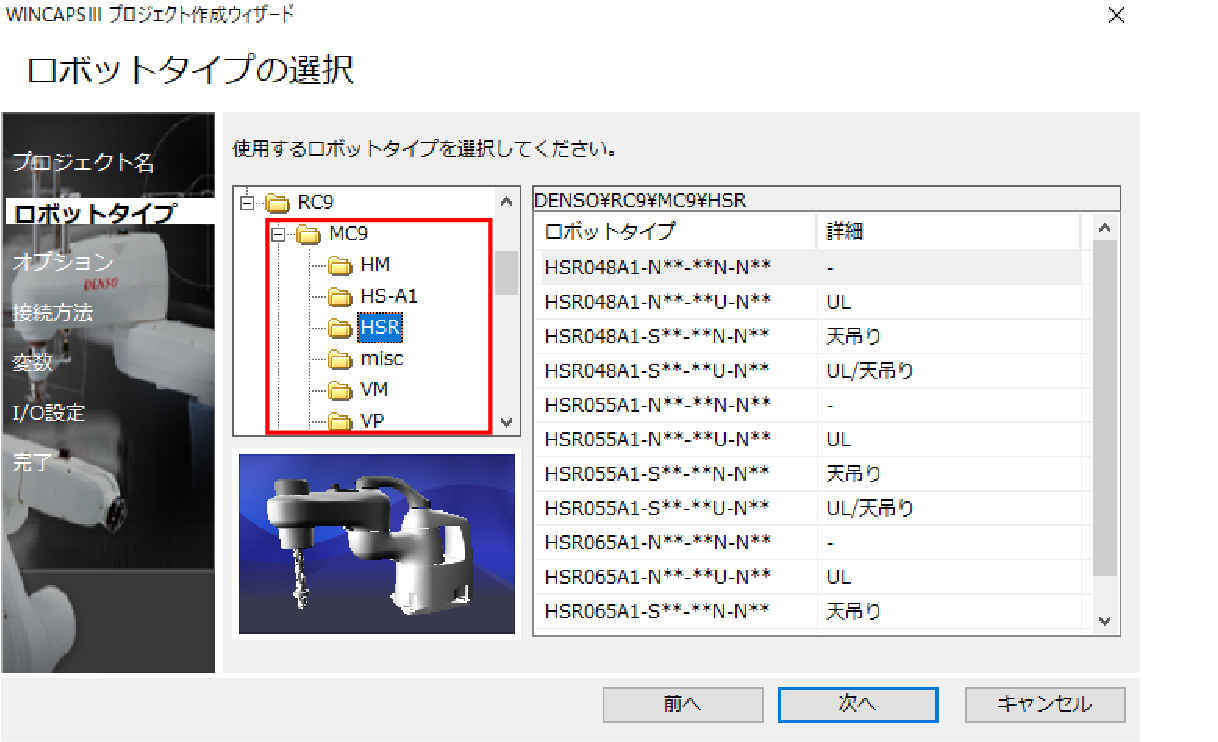
ロボットタイプ選択画面では、[RC9]の下にある[MC9]フォルダ内のロボットからMC9シリーズに接続したいロボットと同じ型式のロボットを選択し、[次へ]を押します。
最後に「完了」画面が表示されます。作成するプロジェクトの内容を確認して、間違いがなければ「プロジェクト作成後の動作」を選択し、「完了」ボタンをクリックします。
詳細については、「プロジェクトの新規作成」をご確認ください。
3
付加軸機能を利用する際は、このSTEPの設定を行います。
利用しない場合は、次のSTEP4へ進みます。
プロジェクトの軸設定表を開きます。
操作経路:[プロジェクトタブ] - [軸設定表] - [軸設定表タブ]
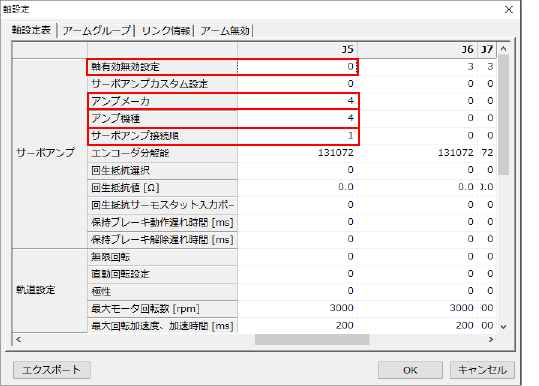
付加軸として利用するすべての軸の設定値を以下のように変更します。
- [軸有効無効設定]を付加軸の状態に合わせて、
[0:有効]もしくは[2:エンコーダのみ有効]に設定 - [アンプメーカ]を[4:DensoWave]に設定
- [アンプ機種]を[4:RC8]に設定
- [サーボアンプ接続順]を[1:1番目]に設定
RC8シリーズロボットコントローラで付加軸として設定した軸番号と同じ軸番号の軸を設定してください。
設定されていない軸を設定するとエラーが発生します。
パラメータの詳細については、「サーボアンプパラメータの設定」をご確認ください。
設定が終了したら[OK]を押し。プロジェクトを保存します。
4
作成したMC9用プロジェクトを使用するMC9に送信するために、MC9シリーズで[MC9ロボット変更許可]を行います。
この操作はスマートTP、ミニペンダント双方で可能です。
4-a スマートTPを利用する場合
RC8シリーズコントローラを接続するMC9シリーズを起動し、メンテナ以上の権限を持つユーザでログインします。
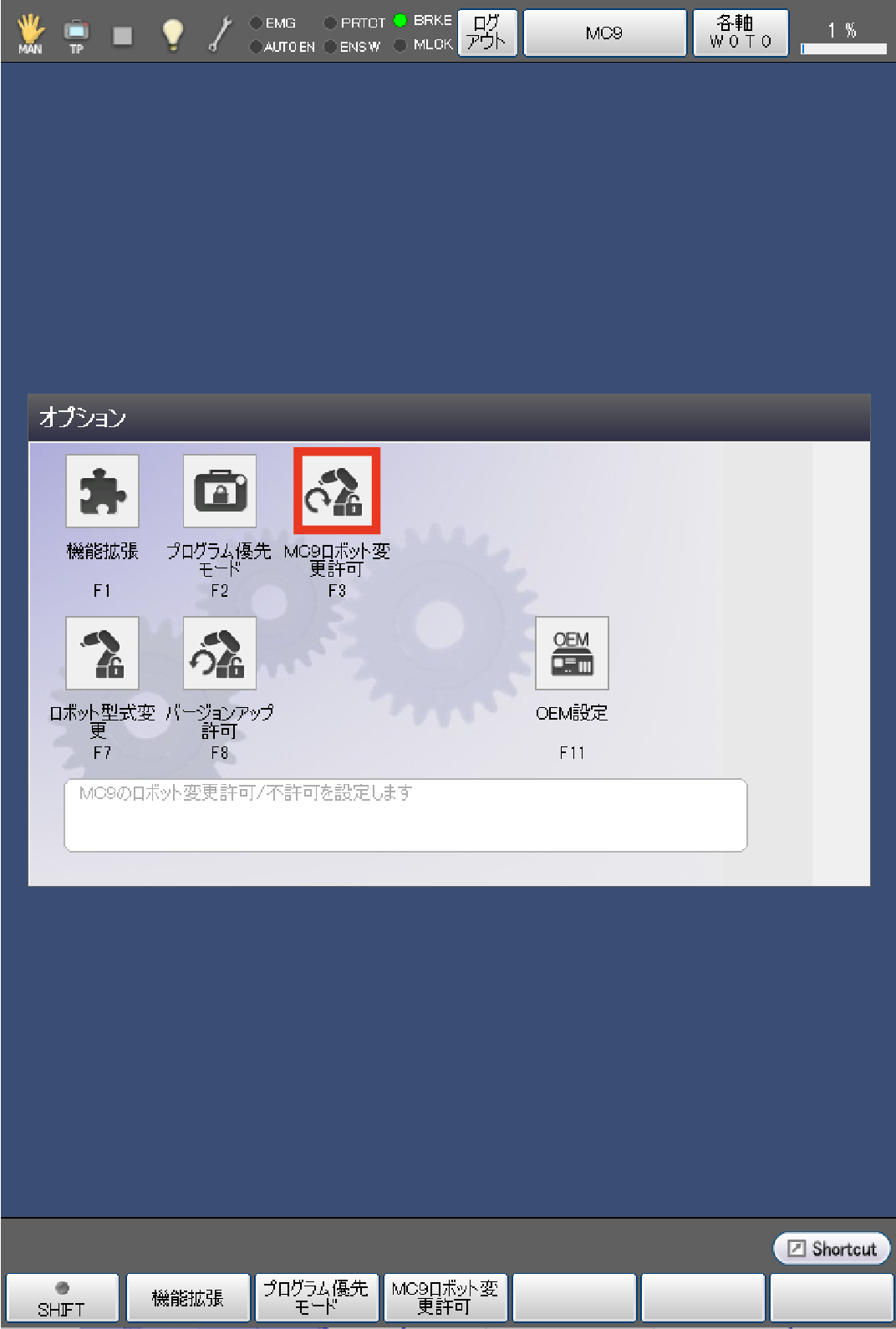
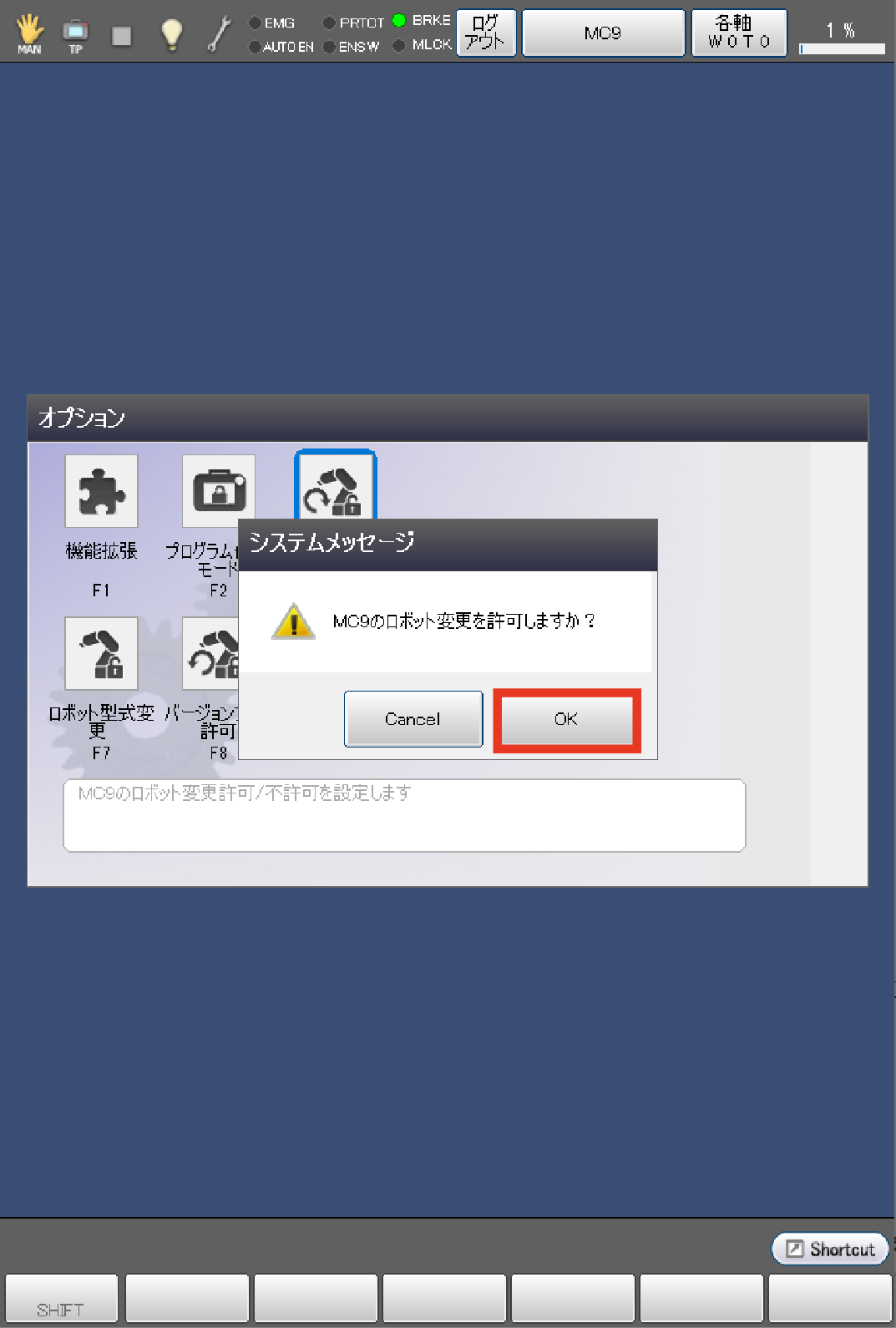
その後、[オプション]画面から[MC9ロボット変更許可]を押してください。
操作手順 : [基本画面] - [F6 : 設定] - [F8 : オプション] - [F3 : MC9ロボット変更許可]
[OK]を押すと、変更を許可するメッセージが出ます。
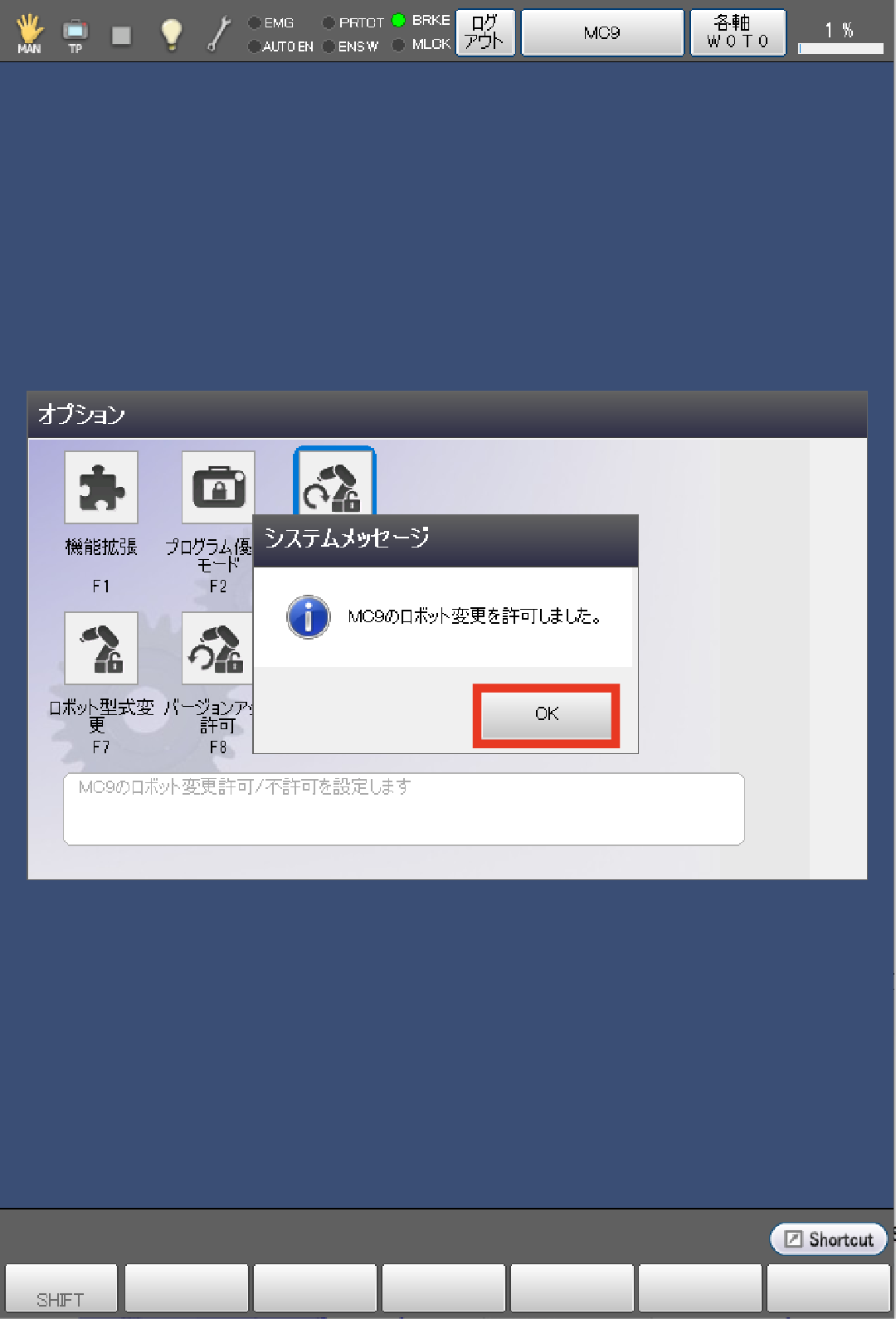
[OK]を押すと、下記のようなシステムメッセージが表示されます。
4-b ミニペンダントを利用する場合
RC8シリーズコントローラを接続するMC9シリーズを起動し、メンテナ以上の権限を持つユーザでログインします。
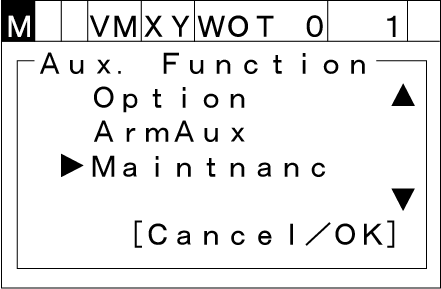
その後、[AUX]キーを押して[補助機能選択画面]を表示してください。
表示後、上下カーソルキーで[Maintnance]を選択します。
[Maintnance]画面表示後、上下カーソルキーで[ChgMC9Rbt]を選択します。
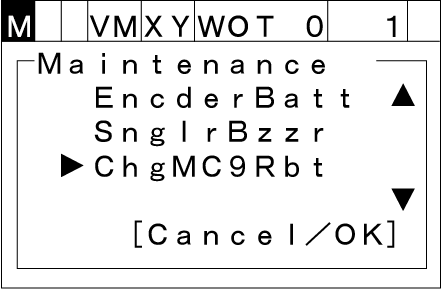
[OK]を押すと、下記のようなシステムメッセージが表示されます
[OK]を押してください。下記のメッセージが表示されれば完了です。
[OK]を押してメッセージを閉じます。
5
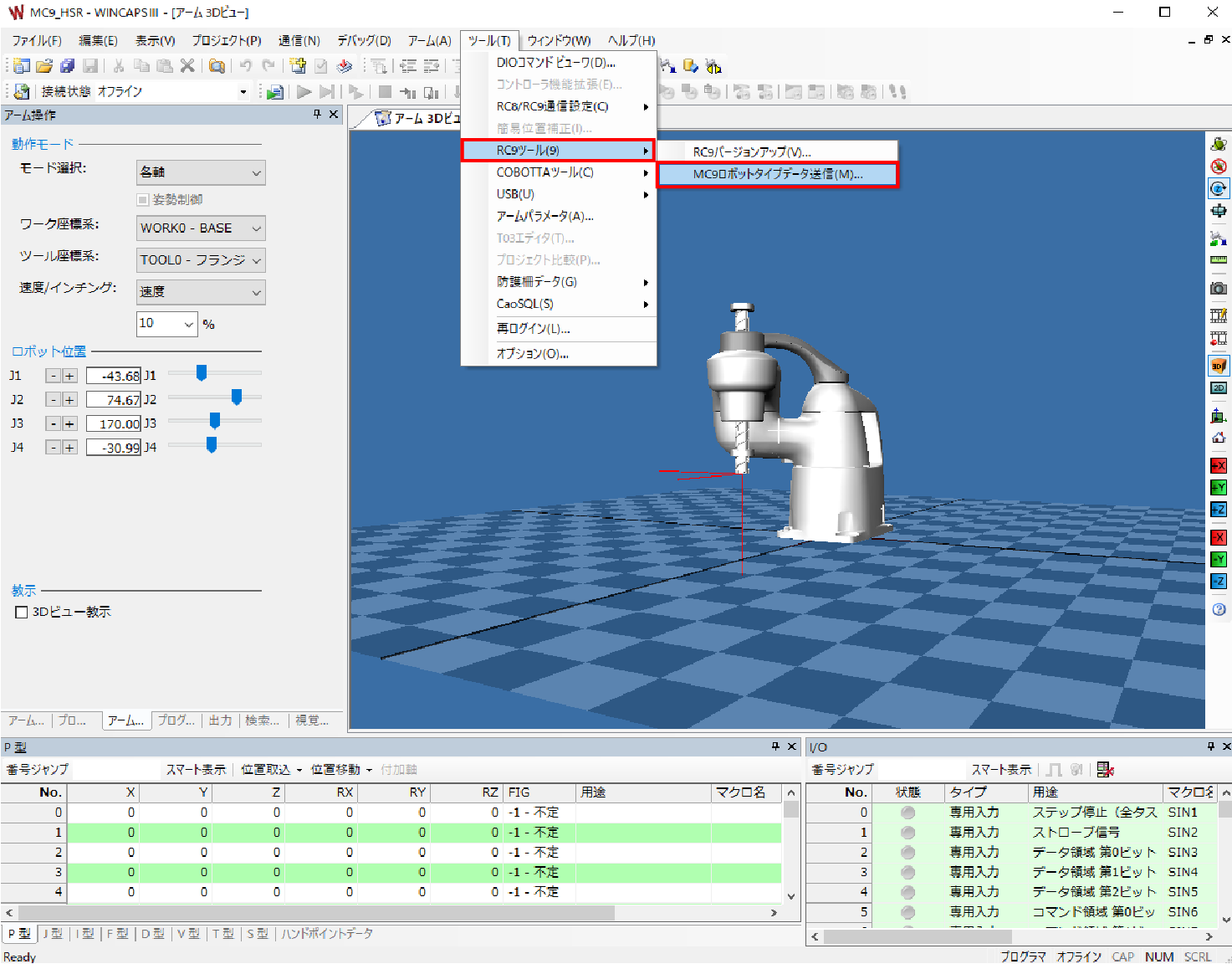
WINCAPSIIIを立ち上げ、ツールタブ内のRC9ツール、MC9ロボットタイプデータ送信を利用しMC9シリーズへデータ送信を行います。
操作経路:[ツール] - [RC9ツール] - [MC9ロボットタイプデータ送信]
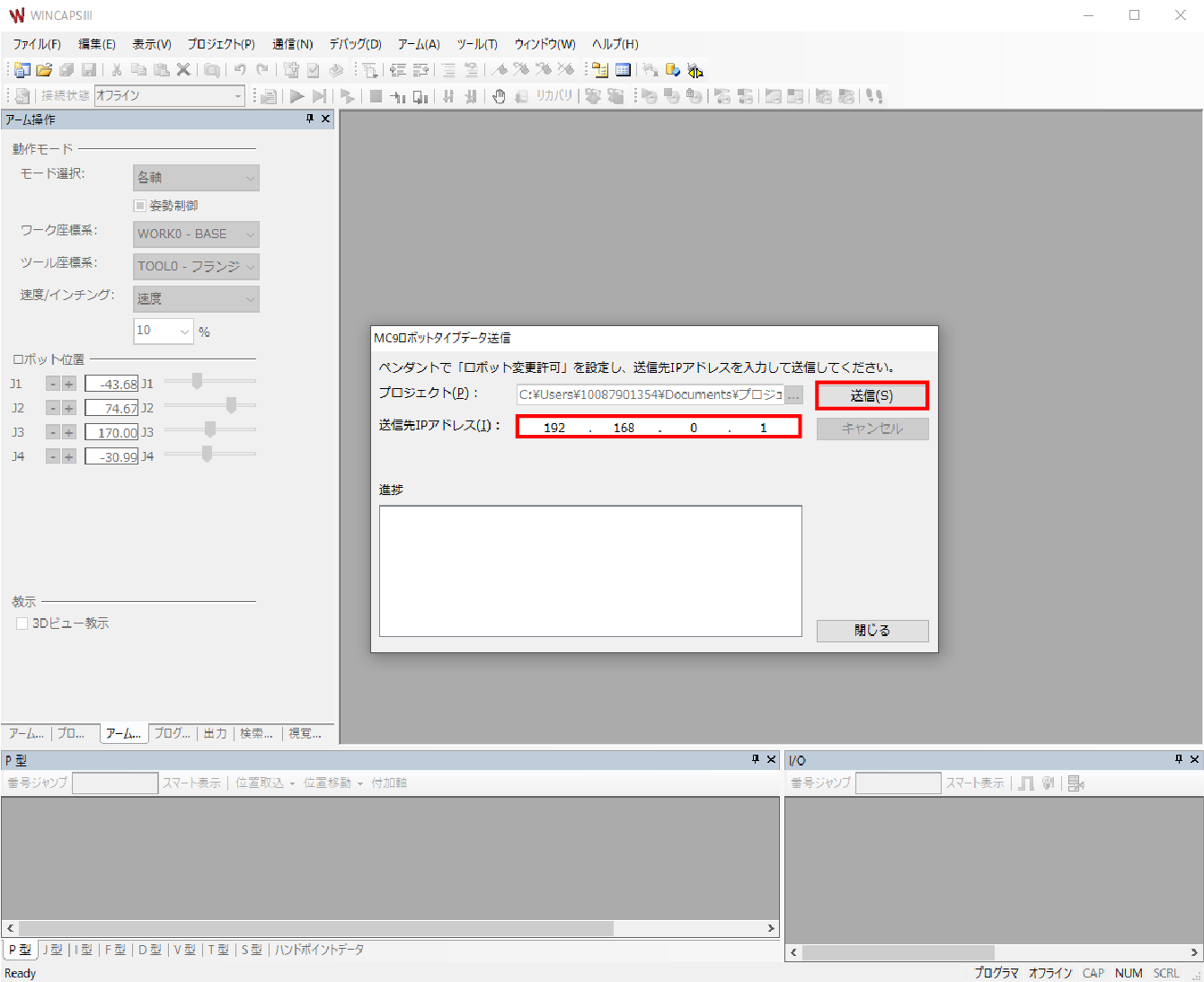
送信完了後、画面の指示に従い、操作してください。
ID : 11092