
ID : 10975
配線の確認
ブレーキ配線、モータ配線を下記の手順で確認します。
ブレーキ配線確認
付加軸のブレーキ解除をRC9ロボットコントローラから行いたい場合、ブレーキ解除推奨回路を利用します。
ブレーキ解除推奨回路を利用しない場合は、付加軸のブレーキをRC9ロボットコントローラから操作することはできません。
ブレーキ解除推奨回路を利用する場合
下記の手順でブレーキを解除し、指定した軸のブレーキが解除されることを確認してください。
1
基本画面 - [F2 アーム] - [F12 保守] - [F1 ブレーキ]を押します。
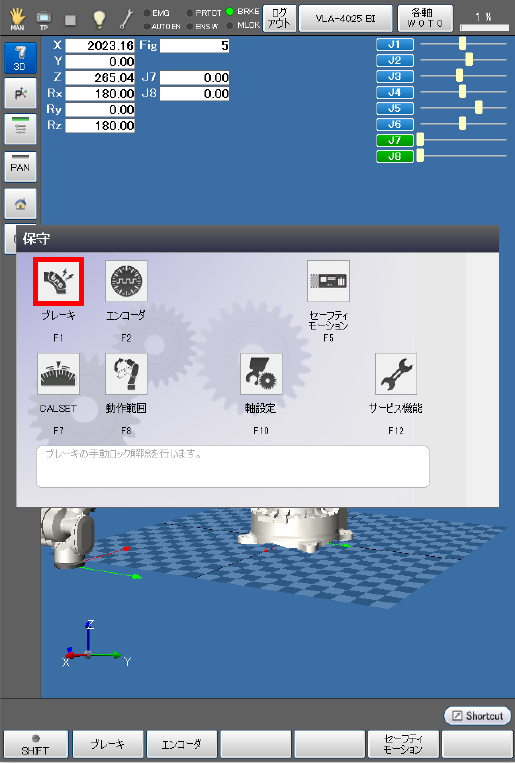
「ブレーキ設定」画面が表示されます。
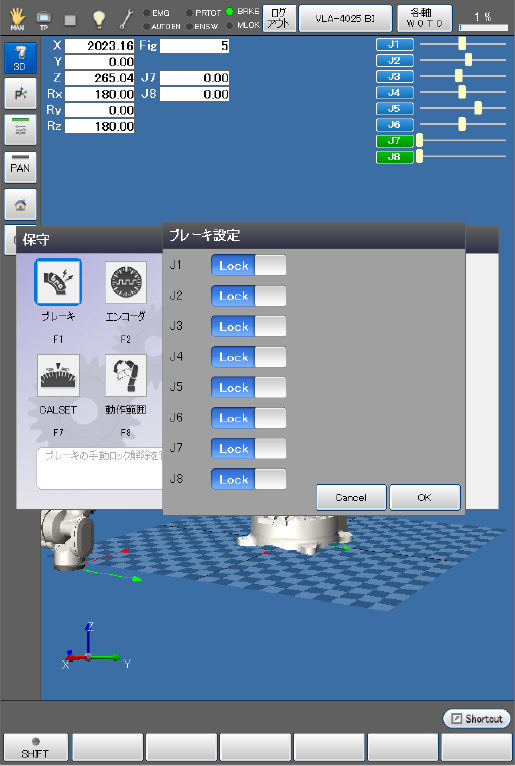
2
ブレーキを解除する軸を選択し、ボタンを押します。"Lock"が"Free"に変更されます。
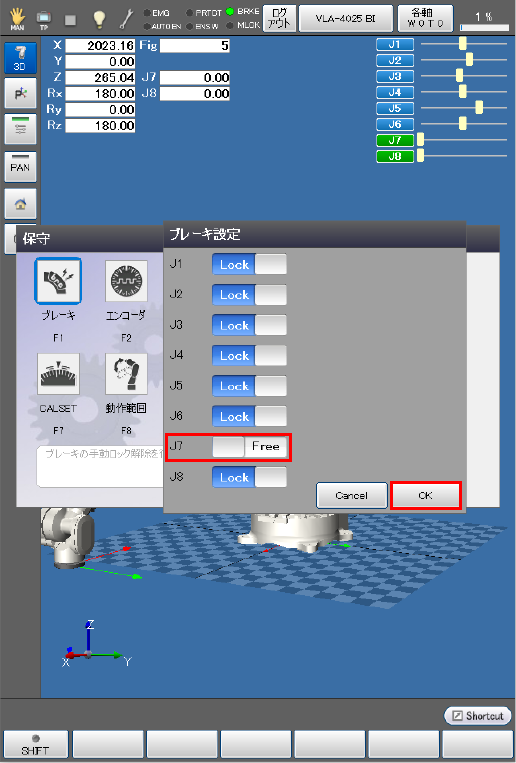
7軸を選択した場合、以下のように表示されます。
すべてのブレーキの設定が完了後、[OK]を押します。
3
ブレーキ設定を変更するかのシステムメッセージが表示されますので、よければスマートTPの[OK]キーを押します。
ブレーキ設定が変更され、ブレーキが解除されます。
[Cancel]を押すと、ブレーキは解除されません。

設定したブレーキが解除され、「保守」画面に戻ります。
4
サーボアンプ接続順で設定した通りのモータが、ブレーキ解除されていることを確認します。
ブレーキを解除した軸が、手で回転するか確認してください。
5
STEP1の手順で「保守」画面を表示し、STEP2の要領でブレーキ解除した軸を"Free"から"Lock"に変更し、スマートTPの[OK]キーを押します。
変更したブレーキがロックされ、「保守」画面に戻ります。
6
モータが、ブレーキロックされていることを確認します。
ブレーキをロックした軸が、手で回せないことを確認します。
ブレーキ解除推奨回路を利用しない場合
1
任意の方法で、モータのブレーキを解除してください。
ブレーキを解除した軸が、手で回転するか確認してください。
2
任意の方法で、ブレーキをロックしてください。
ブレーキをロックした軸が、手で回せないことを確認します。
エンコーダ確認
1
付加軸モータがブレーキ付きの場合、モータのブレーキを解除した状態で、モータに外力を加えて動かしてください。スマートTPの「ロボットの現在位置情報」画面にて、設定中のモータの対応する軸が変化することを確認してください。
操作経路: 基本画面 - [F2 アーム]
2
- モータをONします。
- スマートTPの手動操作で±方向に動かし、異常なく動作するかを確認します。
- この時点では、手動操作ができることを確認できれば問題ないため、大きく動作させる必要はありません。
- 操作キーと、付加軸の±動作方向が意図した動作方向になっているかを確認しておきます。逆になっている場合は、[軌道設定]内の[極性]の設定を変更します。
モータ配線確認
モータ電源を投入し、速度設定を10%程度に設定し、手動各軸モードで手動動作することを確認してください。
手動動作時にモータが発振したり、エラー停止する場合は、モータ線の配線を確認してください。配線に異常がない場合は、サーボパラメータの位置比例ゲイン、速度比例ゲインを徐々に下げてください。
ID : 10975