
ID : 10966
付加軸の手動動作
ここでは付加軸に関連する項目のみを説明します。その他の仕様については、「手動モード」を参照ください。
スマートTPを使用する場合
1
動作モードを手動へ変更し、モータ電源を入れます。
動作モードの変更方法は、「動作モード切り替え方法」を参照ください。
2
基本画面 - [F2 アーム]を押します。
以下の「ロボット現在位置情報」画面が表示されます。
付加軸の位置は、[軸有効無効設定]が有効になっている軸がある場合のみ、表示されます。
表示されていない場合は、「サーボ設定」画面で[軸有効無効設定]を[有効]に設定してください。
操作経路: [F2 アーム] - [F12 保守] - [F10 軸設定] - [F5 サーボ設定]
詳細については、「サーボパラメータの設定」を参照ください。
- この画面は表示させなくても、付加軸は手動で動作します。
-
イネーブルSW連動機能により、イネーブルSWを押した時のモータ電源ON連動の設定することができます。 詳細については、「イネーブルSW連動機能の設定」を参照ください。
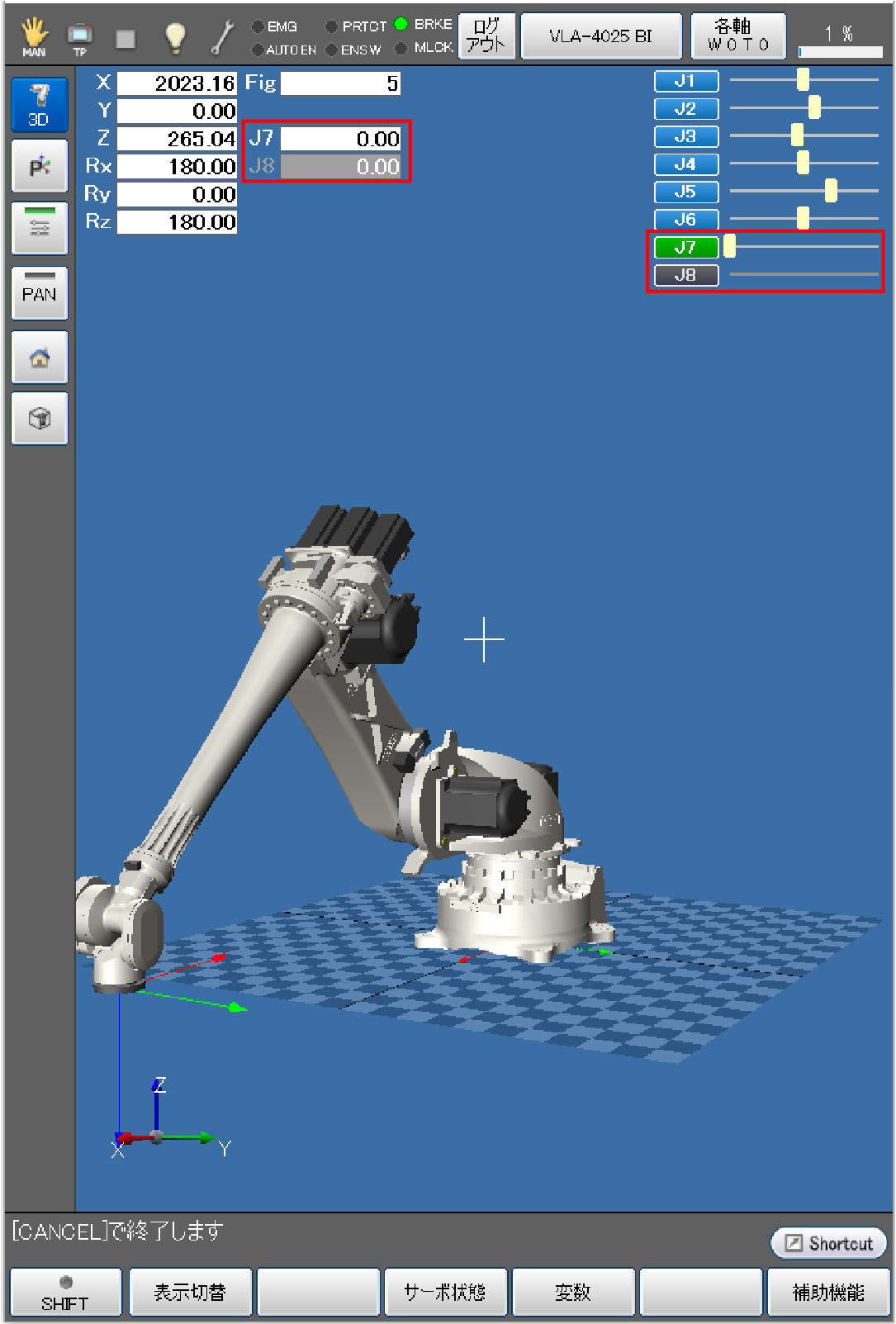
画像内の赤枠で囲まれた部分が、付加軸の現在位置を表します。
画像は、7軸が有効、8軸が無効の設定を行った場合です。
5
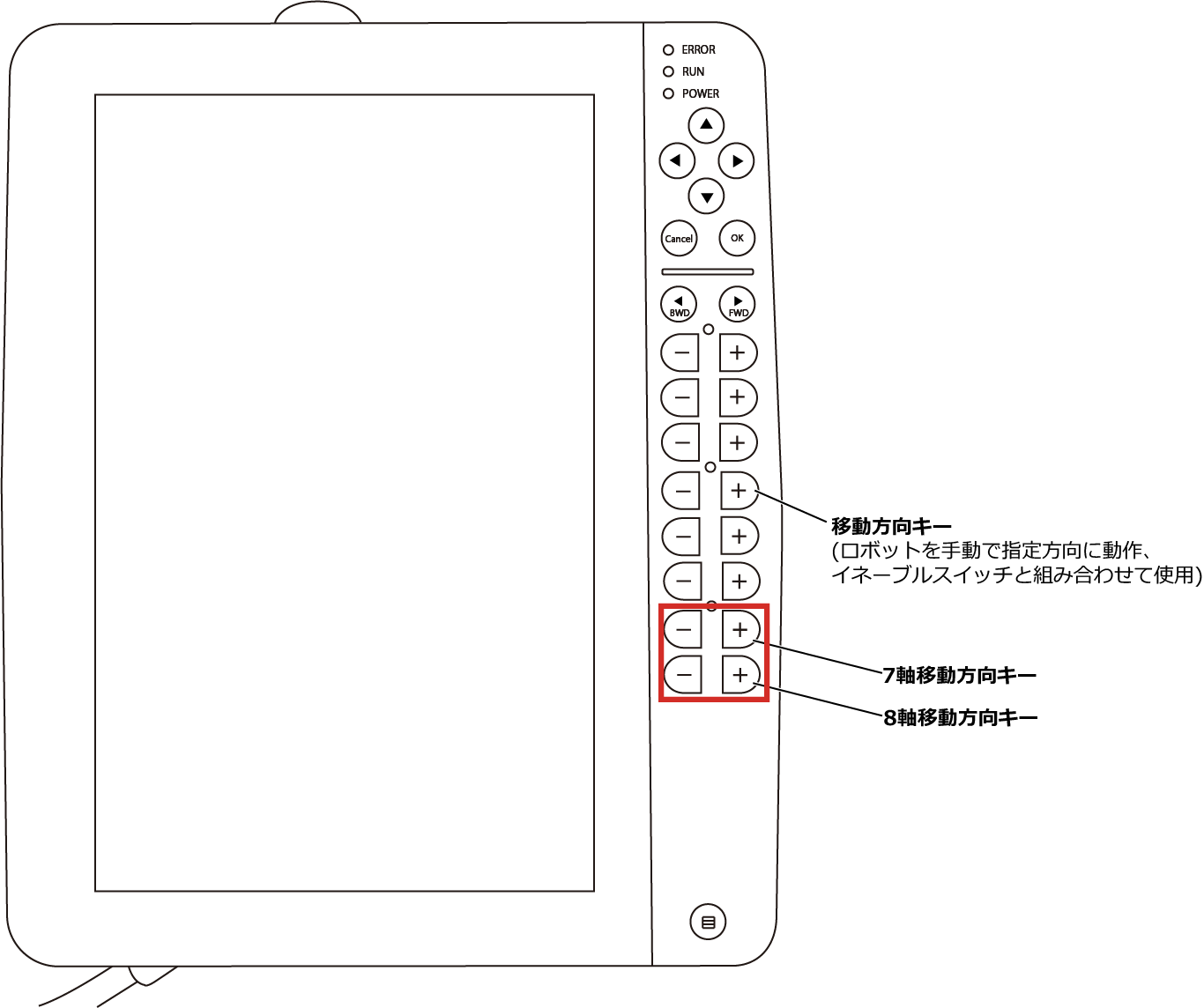
イネーブルスイッチを押しながら、移動方向キー動作させたい軸の移動キーのいずれかを押して、付加軸を動かします。
ID : 10966