
ID : 10765
開始位置を同期させる
COBOTTAとスレーブロボットの各軸の角度が異なる場合、追従動作を実行することができません。追従動作を開始する前に、各軸の同期を行います。
スレーブロボットの各軸位置がCOBOTTAの可動範囲外にある場合は、同期が完了できません。同期動作を始める前に、スレーブロボットの各軸をCOBOTTAの可動範囲内に移動してください。
操作方法
1
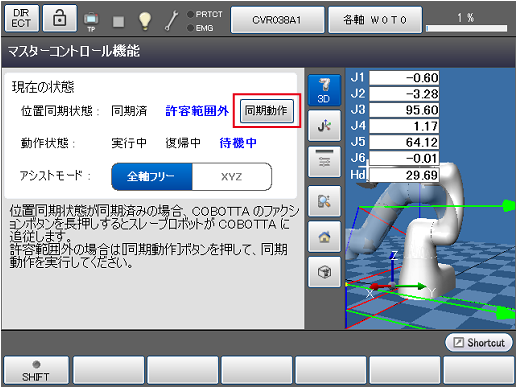
マスターコントロール機能画面で[同期動作]を押します。
2
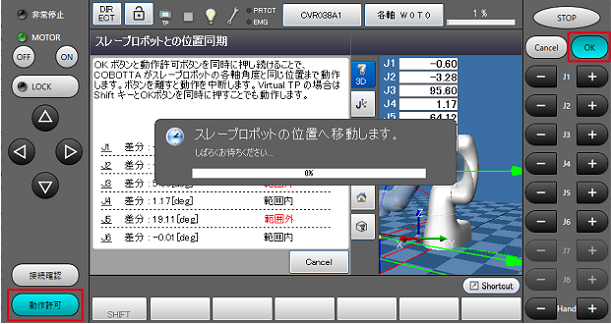
COBOTTAの周辺に障害物がないことを確認します。スレーブロボットとの位置同期画面で[動作許可] [OK]の順に押すことでCOBOTTAが動作します。100%になるまで、[動作許可]と[OK]を押し続けてください。
3
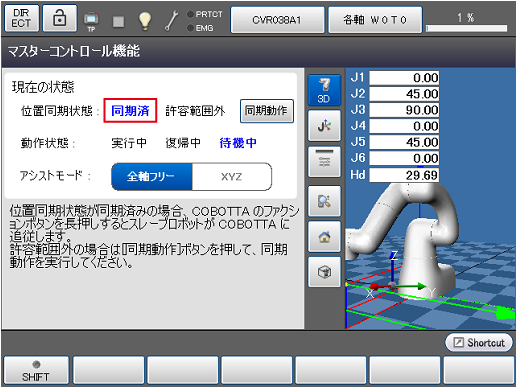
位置同期状態が "同期済" になっていれば、同期は完了です。
ID : 10765