
ID : 10761
スレーブコントロールへの切り替え
スレーブコントロールにする
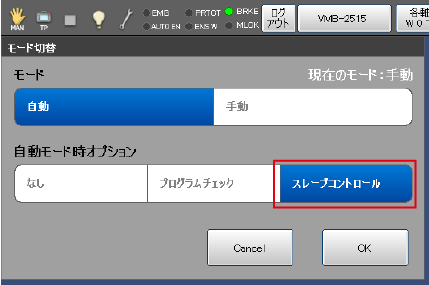
自動モードに切り替えるときに、モード切替画面で [自動モード時オプション] の [スレーブコントロール] を選択します。
スレーブコントロール設定
[自動モード時オプション] の [スレーブコントロール] を選択して自動モードに切り替えた場合、下記パラメータの設定画面が表示されます。
このパラメータの設定は、[F6 設定] - [F8 オプション] - [F6 スレーブコントロール]からも表示できます。
[次回から自動表示をしない]にチェックを入れると、モード切り替え時にパラメータの設定画面が表示されなくなります。
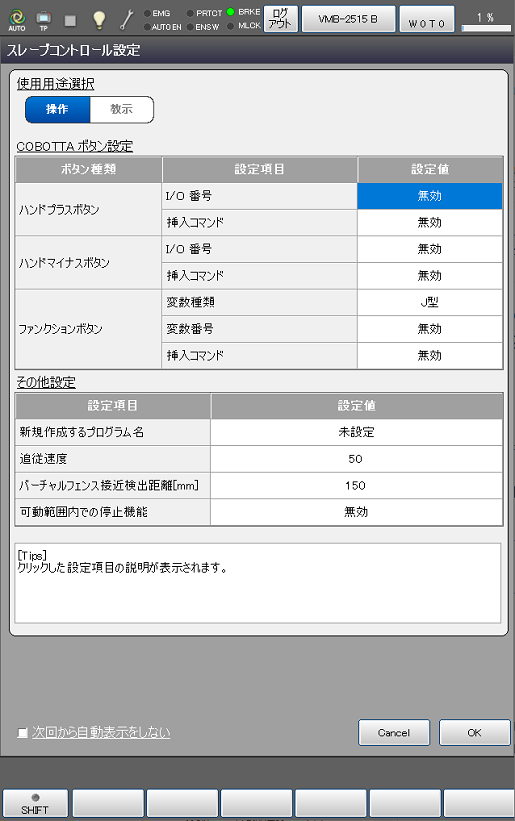
使用用途選択
マスタ・スレーブの使用用途を選択します。
| パラメータ名 | 内容 |
|---|---|
| 操作 | COBOTTAを操作して、スレーブロボットを動かします。 現在位置の取り込み や コマンドの自動挿入は行われません。 |
| 教示 | COBOTTAを操作して、スレーブロボットの教示を行います。 COBOTTAのボタンを押した際に、設定に応じてコマンドの自動挿入や現在位置の取り込みを行います。 コマンドの挿入を行うには、プログラム編集画面が表示されている必要があります。 |
COBOTTAボタン設定
| パラメータ名 | 初期値 | 内容 | |
|---|---|---|---|
ハンドプラスボタン |
I/O番号 | 無効 | COBOTTA のハンドプラスボタンを押した際に、ON/OFF を切り替えるI/O 番号を設定します。"-1" を設定した場合は無効になります。 |
| 挿入コマンド | 無効 | COBOTTA のハンドプラスボタンを押した際に、設定に応じたコマンドを自動挿入します。 | |
| ハンドマイナスボタン | I/O番号 | 無効 | COBOTTA のハンドマイナスボタンを押した際に、ON/OFF を切り替えるI/O 番号を設定します。"-1" を設定した場合は無効になります。 |
| 挿入コマンド | 無効 | COBOTTA のハンドマイナスボタンを押した際に、設定に応じたコマンドを自動挿入します。 | |
| ファンクションボタン | 変数種類 | J型 | COBOTTAのファンクションボタンを押した際に、現在位置を記録する変数種類を設定します。記録できる編集は下記の3種類です。
|
| 変数番号 | 無効 | COBOTTAのファンクションボタンを押した際に、現在位置を記録する変数番号を設定します。"-1" を設定した場合は無効になります。 | |
| 挿入コマンド | 無効 | COBOTTA のファンクションボタンを押した際に、設定に応じたコマンドを自動挿入します。 | |
その他設定
| パラメータ名 | 初期値 | 内容 |
|---|---|---|
| 新規作成するプログラム名 | 未設定 | 新規作成するプログラム名を指定します。マスタ・スレーブ用のプログラムテンプレートで作成されます。 プログラム名を設定して、スレーブコントロール画面で[OK]を押した場合は、自動的にプログラム編集画面に遷移します。 |
| 追従速度(*1) | 100 | スレーブロボットがマスタロボットに追従する際の動作速度を設定します。 追従速度が小さい場合、スレーブロボットの動作が不安定になり、正常に追従できない恐れがあります。 |
| バーチャルフェンス接近検出距離[mm] | 150 | スレーブロボットがバーチャルフェンスを検出する距離を設定します。 |
| 可動範囲内での停止機能(*2) | 無効 | この機能を有効にすると、スレーブロボットがバーチャルフェンスに接触する手前で停止します。 |
*1 : このパラメータは、COBOTTAとの接続中に値を変更しても設定は反映されません。COBOTTAと再接続したタイミングで反映されます。
*2 : この機能でスレーブロボットがバーチャルフェンス手前で停止した場合、スレーブロボットがバーチャルフェンスに接触しない位置にCOBOTTAを移動させたタイミングで、スレーブロボットは追従を再開します。
スレーブコントロール出力IO番号
[アーム]の補助機能に、[使用条件]メニューがありますので、そこで設定します。
操作については、スマートTP操作ガイドの "使用条件の表示・設定" を参照してください。
| 番号 | パラメータ名 | 初期値 | 内容 |
|---|---|---|---|
| 284 | スレーブコントロール出力IO番号 | -1 | マスタ・スレーブのライセンスが有効な場合、このパラメータで指定された I/O を起動時にONします。 "-1" を指定した場合は無効になります。 |
ID : 10761